V
主页
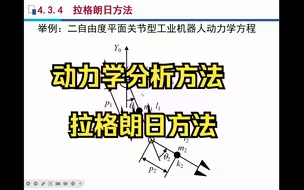
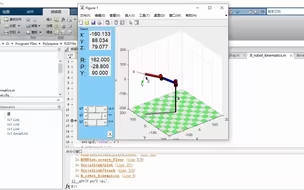
机器人动力学拉格朗日法详细推导(二连杆机械臂)
发布人
机器人动力学方程推导十分繁琐乏味,极易出错,多数书上是直接跳过推导过程,即使有少量过程,也总会出或多或少的错误。而本期视频,是一步步详细去推导动力学方程,每个计算细节都有提及,所以应当是有一定价值的,希望对你有所帮助。
打开封面
下载高清视频
观看高清视频
视频下载器
机器人学 3.2 拉格朗日动力学算法(Lagrangian mechanics)
4-15动力学分析方法-拉格朗日方法
机器人学基础:并联机器人运动学与动力学分析
拉格朗日力学的理解(简单聊聊,大家可以随便听一听)
运动学、动力学Matlab代码,Roy Featherstone开源的程序,还有russ tedrake教授的研究,可以参考他们的来写
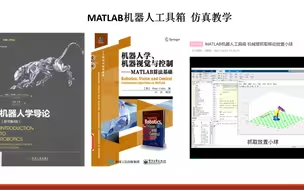
MATLAB机器人工具箱10.4 机械臂仿真教学(未完结)
专本硕都能入行机器人行业,缺口极大,待遇很好
机器人动力学建模的拉格朗日方程
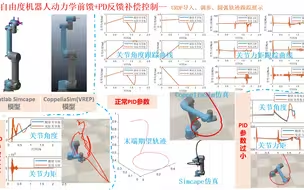
六自由度机械臂动力学轨迹跟踪控制
【自制】我造了一台钢铁侠的迷你机械臂 !【硬核】
机器人学 3.15 拉格朗日动力学(矩阵形式推导)(较难)
万物皆可拉格朗日
【机械臂运动学教程】机械臂+旋转矩阵+变换矩阵+DH+逆解+轨迹规划+机器人+教程
【流体力学】震惊!某up主居然花了一个小时讲解拉格朗日法、欧拉法以及物质导数
MATLAB机械臂运动仿真+轨迹规划
机械动力学
十分钟掌握机器人运动学|理论和仿真讲解|源码公开
《从零开始的理论力学》1.4.推导拉格朗日方程
matlab 机器人 运动学 正逆运动学 轨迹规划 出图
MATLAB 2R机械臂仿真
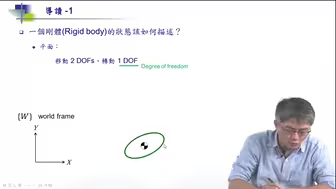
34 刚体动力学方程
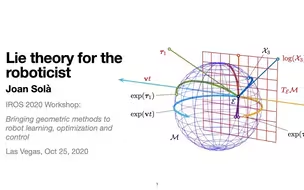
机器人学——李群、李代数快速入门
[中英文字幕] 首尔国立大学-机器人机构学与控制
【Matlab机器人工具箱】- 运动学①---建立机器人模型--1、Link类 2、SerialLink类
机器人学基础:串联机器人运动学与动力学分析
串联和并联机器人运动学与动力学分析
[课设验收]二自由度机械臂上位机设计
拉格朗日方程组我就不讨论入!而且要算的又快又准!!
matlab二连杆机械臂工作空间
机器人学 3.6 牛顿欧拉递推动力学算法
机器人学 3.1 拉格朗日动力学的数学推导
高中物理竞赛第11期:拉格朗日方程
(试看)Matlab机械连杆机构运动学仿真\四杆\五杆\六杆\滑块\连杆\gif\动画\动图\曲柄滑块\曲柄连杆\编程\入门\精通\零基础\画图\绘图\大数据
画直线机构:罗伯特连杆
做机器人有必要了解下这种机构
机器人学 | 2.1 机械臂的位姿描述(重点为旋转矩阵)
【机器人理论最好中文入门课程 没有之一】 机械臂 系统 结构 旋转矩阵 变换矩阵 DH模型 运动学正逆解 轨迹规划 动力学 控制 遥控操作 教程
机器人运动控制简明教程 第四节 拉格朗日动力学方程
基于动力学模型的机械臂轨迹跟踪
机器人学:建模、控制与视觉——华中科技大学