V
主页
京东 11.11 红包
仿生手,一体化电机关节模组可定制刹车、低温(-40度)、防水(ip67)、通讯can/EtherCAT 、出线方式、结构输出件等。
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
国产驱动器,驱动关节电机测试
大中空国产磁编,替代雷尼绍aksim-2,可做z增量,绝对式(biss-c,ssi)等多种通讯方式,可应用于医疗、国防、航空航天、工业、机器人系统中。
今天给大家介绍无框电机,他们具备哪些特点呢,是因为这些特点它才适合用于各种机械臂,四足机器人,双足机器人,手术机器人关节等
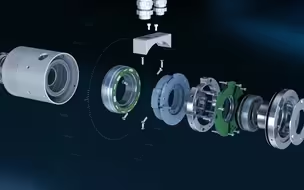
谐波中空减速电机模组,机器人关节,小尺寸大转矩
谐波电机模组50-100,所有参数详细测试介绍,机器人关节模组介绍。可用于四足机器人,双足机器人,手术机器人和机械臂等。
机械臂关节示教模式(类似)
机器人关节,电机模组1.5米水深测试。
Tq无框电机
使用正运动控制器测试ethercat通讯,完美控制,直流驱动器的使用欢迎交流。
有没有大神看看我们做的谐波电机,机器人关节模组
2.继续更新60-100谐波减速电机,机器人关节模组测试,集成驱动器编码器制动器于一体。
介绍一款云台电机
机器人关节,重复定位精度测试,350mm臂长测试出重复精度小于0.02mm,转换成角度重复精度小于0.004度
Aksim-2雷尼绍编码器,Renishaw磁编码器读数头,中空编码器模块,适合用于机器人关节和转台。
ETHERCAT和CANopen通讯的区别及其用途介绍,为什么有些场合大家会选择canopen,而不选择ethercat
Kollmorgen,如何为您的协作机器人选择无框架电机-两分钟运动
TQ无框电机安装视频,多用于手术机器人等机器人关节。
TQ-RoboDrive |世界最先进的drive
空心杯电机在人形机器人的应用
人型机器人关节,自带驱动CAN
机器人关节负载重复精度
关于雷尼绍绝对式光栅的介绍
Elmo控制器加Elmo驱动器,关节电机搭配
大神们见过这种TQ无框电机吗
RLS磁性编码器最适合TQ-RoboDrive电机(案例研究、翻译、我看完收获很多分享给大家)
-45度环境下,直流驱动器低温测试。微型国产驱动器
一款中空磁编介绍
微型伺服驱动器,适合各种电机,目前已经在很多人形机器人,四足机器人,半导体设备,特种军工机器人和设备等,欢迎咨询
爬壁机器人,这个蜘蛛侠机器人可以利用电磁脚爬上墙壁和附着在天花板上(翻译)
最近升级了一下无框电机的定子,使用镀银的设计,优点是电阻值更小,电感,电容一致性会更好。
谐波双编码器制动器驱动器集成一体的机器人关节模组。
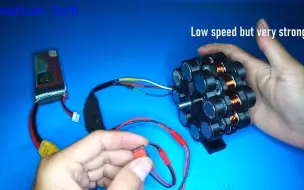
如何做一个强大的无刷电机
非接触式中空磁编。产品体积小巧,大中孔,集成到空间有限的应用中。可提供 SSI、BiSS、UART、SPI 、ABZ 通讯接口,提供最高 20 位的角度分辨率。
Elmo驱动器,各种常用型号,小体积,大扭矩,几乎支持任何反馈和任何电机,完美控制。
HD-哈默纳科CSF超小型谐波减速机
腾讯Robotics X实验室的机器人小五(The Five),这作为原型机在养老院实验场景做的一次任务展示,希望未来能在人居生活中发挥作用,欢迎大家来围观。
单圈or多圈绝对式编码器,增量编码器,大中空,超薄分体式。
无力矩传感器的力矩控制效果,建模加观测器算法,电流环反馈负载的力矩,动力学模型计算应该的力矩,对比得到力矩突变,做的碰撞检测。
工作日常,无框电机,定子引线的焊接
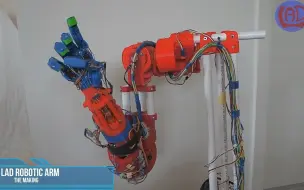
LAD机械臂-制作- 3D打印- 5个伺服DIY