V
主页
机器人关节负载重复精度
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
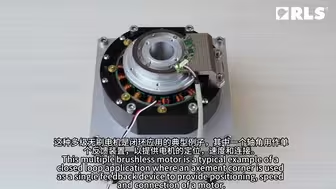
国产驱动器,驱动关节电机测试
机器人关节运动和可视化
仿生手,一体化电机关节模组可定制刹车、低温(-40度)、防水(ip67)、通讯can/EtherCAT 、出线方式、结构输出件等。
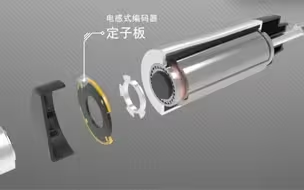
人形机器线性关节--电感编码器
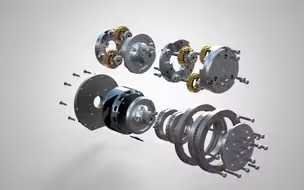
来看看行星减速电机,机器人关节模组内部是怎么运行的吧
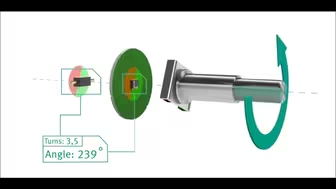
纯国产高精度电感编码器
人型机器人关节,自带驱动CAN
Figure 02 Trailer
Aksim-2雷尼绍编码器,多用于机器人关节,最大20bit分辨率
减速电机模组,机器人关节,正反转调速测试。
Elmo驱动器轻松适用机器人关节电机。
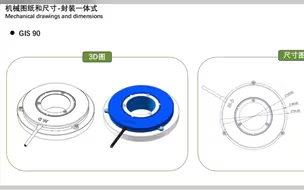
(翻译)雷尼绍AksIM磁编码器安装说明
环形直流驱动器,高电流1-140A
环形驱动器目前可做1-80A电流,100V内宽电压,可定制140A或者210A更高电流水平。同时对于关节中使用的场景加强了散热水平。
Kollmorgen,如何为您的协作机器人选择无框架电机-两分钟运动
直流伺服驱动器,支持各种定制。人形机器人,四足轮足机器人,特种水下设备,自动化设备等。大电流1-210A,各种反馈可支持。欢迎交流
机器人关节,重复定位精度测试,350mm臂长测试出重复精度小于0.02mm,转换成角度重复精度小于0.004度
机器人关节,电机模组1.5米水深测试。
谐波中空减速电机模组,机器人关节,小尺寸大转矩
140A大电流驱动器,搭配大电流人形关节,欢迎交流
机械臂关节示教模式(类似)
POSITAL编码器磁技术
(翻译)动画视频-低间隙行星齿轮箱的设计和工作原理
精密减速机的谐波减速机和RV减速机介绍
Elmo控制器加Elmo驱动器,关节电机搭配
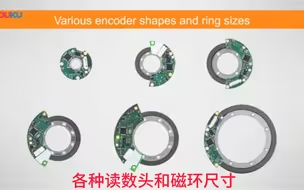
rls量产型产品:分辨率18位BISS 读头,重复精度低于分辨率单位,定位精度大于正负。25mm内径磁环,49mm外经磁环,最大转速10000prm。
关于雷尼绍绝对式光栅的介绍
谐波一体化关节,机器人关节,执行器
四个简单步骤:安装全新一代36mm绝对值多圈KIT编码器
重力补偿,0重力示教。
听说负载台太贵了,做一个简单的行了吧(70A额定,140A峰值)
无力矩传感器的力矩控制效果,建模加观测器算法,电流环反馈负载的力矩,动力学模型计算应该的力矩,对比得到力矩突变,做的碰撞检测。
3D打印机器人执行器组件,在这个视频中,我展示了为我的四足机器人设计的机器人执行器的完整组装
行星减速电机,机器人关节模组,安装简单介绍
云台电机,加光编码器,直流驱动器控制定位精度高达1-2角秒。
机器人关节模组介绍
Posital 博思特 Kit编码器安装在步进电机教程
TQ无框电机安装视频,多用于手术机器人等机器人关节。
爬壁机器人,这个蜘蛛侠机器人可以利用电磁脚爬上墙壁和附着在天花板上(翻译)
自制机器狗-Kangal