V
主页
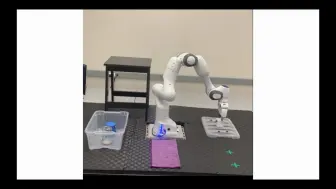
基于优化的敏捷足式机器人控制与规划
发布人
演讲介绍了两个关键进展: 模型预测控制框架能够在四足机器人和人形机器人中实现具有大角度偏移的高动态运动; 基于优化的轨迹生成框架,在挑战性地形中具有长视野运动策略。
打开封面
下载高清视频
观看高清视频
视频下载器
UCB《工程领域中的优化模型|EECS 127 Optimization Models in Engineering(Fall 2020)》deepseek翻译
Stanford CS25: Robotics and Imitation Learning
MIT机器人操作Lecture 2
敏捷自适应四足机器人的分层优化控制
从物理互动中学习结构化世界模型
【Python】人形机器人——模型预测控制
【超多模型MPC算法】开源Mujoco-MPC演示
[RLC 2024] Peter Stone,实用强化学习:30 年研究的经验教训
机器人空间感知基础
编译器的黄金时代
机器人中的数值方法
从物理系统中学习的欧几里得神经网络E(3)NN
以内存为中心的计算
通过扩散策略进行机器人灵活操作
下一代机器人感知:3D场景图,可验证算法,自监督学习
【凸优化 EE364A 2008】斯坦福大学—中英字幕
非稳态环境中的安全RL:理论与算法
[SIGCOMM2023] : Offloading
通用机器人路径思考:scaling law、数据飞轮和具身智能
SynH2R:合成的手-物体运动以学习人机间物体传递
机器人可达性研究
Daniel Kuhn:异构数据源的Wasserstein分布鲁棒优化
凸集图及在最优控制和运动规划中应用
GRASP on Robotics: 通过柔性、动力学和接触特性实现灵活的机器人
GRASP on Robotics:Doing for our robots what nature did for us
【顶刊复现】基于MPC模型预测控制水下机器人AUV的路径跟踪
基于主动推理的复杂任务在线Pareto最优决策案例
MIT Robotics:灵活多模态机器人工具使用
LLM与ROS(机器人操作系统)
以人为中心的机器人以及学习如何实现通用性
Learning Abstractions from Humans
「精校熟肉」Optimal Control-最优控制(CMU 16-745) 2024-L5-优化(下)
CSAIL 几何深度学习:从欧几里得到药物设计
Ameca机器人及一些讨论
Dynamics on Neural Networks
MIT Robotics:折纸结构和柔性机器人的计算机设计过程
学习可变形物体操作的长期双手动任务
Mamba和S4解读:架构、并行扫描、内核融合、循环、卷积、数学
家庭通用机器人
EI Seminar:如何打造通用机器人