V
主页
京东 11.11 红包
SynH2R:合成的手-物体运动以学习人机间物体传递
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
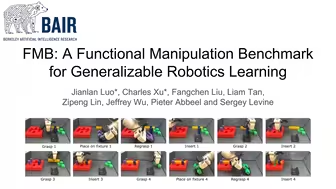
FMB:泛化机器人学习的功能性操作基准
敏捷自适应四足机器人的分层优化控制
机器人空间感知基础
ML与程序合成
家庭通用机器人
CXL内存优化AI推理
下一代机器人感知:3D场景图,可验证算法,自监督学习
Jim Fan 谈 Nvidia 的 Embodied AI Lab 以及老黄关于所有机器人都将实现自主预测
3D合成数据
高分辨率触觉感知在反应式机器人操作中的应用
以人为中心的机器人以及学习如何实现通用性
EI Seminar:让机器人能看到,能操作
[NSDI2023] TopoOpt: 为DNN训练作业联合优化网络拓扑和并行化策略
GRASP on Robotics: 通过柔性、动力学和接触特性实现灵活的机器人
足式机器人的视觉全身操控与运动
Real World Robotics Tutorial3:识别机器人的运动学和动力学
通过扩散策略进行机器人灵活操作
新型无人机正改变游戏规则
通过语言、逻辑和YouTube视频数据实现长期操作的可扩展机器人学习
复杂环境中的机器人运动
利用声音控制开门的小工具
AI Hardware
LLM与ROS(机器人操作系统)
Stanford Seminar: 亚马逊电商里机器人应用
MIT Robotics:折纸结构和柔性机器人的计算机设计过程
MJPC:实时行为合成的异步UI
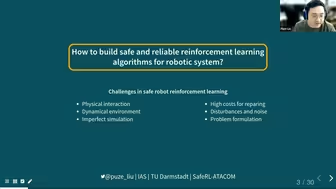
动态环境中安全可靠的机器人RL
使用视觉和本体感知的因子图在线估计关节物体
迈向机器人多智能体系统中大规模合作学习
MIT机器人操作Lecture 2
为什么需要建立机器人学徒但不单独做?
Robotics in the Age of Generative AI
机器人学习中的收缩理论
Naval对于AI创业的思考
[Stanford Seminar] 将数据驱动的CBF近似与HJ可达性相结合
自适应协作机器人
Generative AI 前沿周报
机器人控制的不同鲁棒性观点
通过学习规划和感知进行任务和运动规划
使用事件和帧降低运动模糊对NeRF重建影响