V
主页
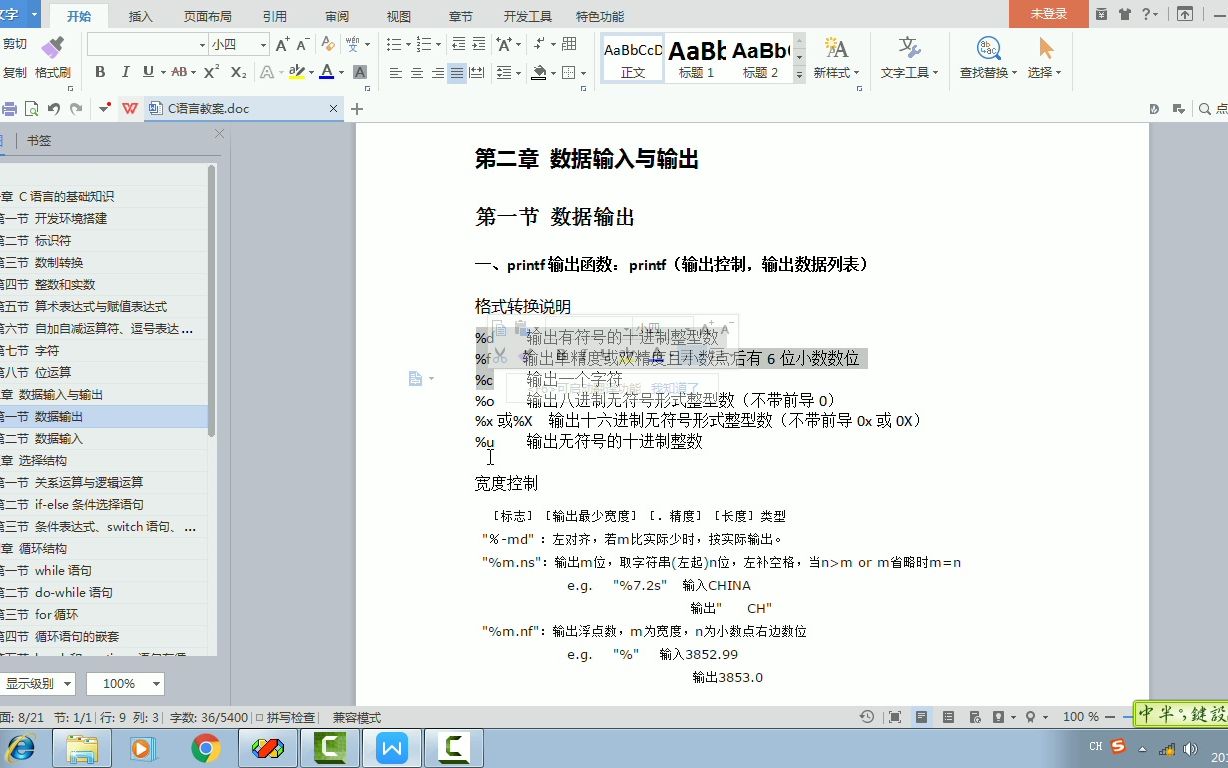
第二章 数据输入与输出1.数据输出
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
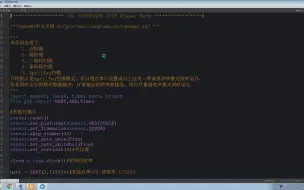
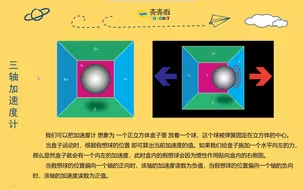
第二章 飞控开发基础篇 6.SPI(六轴传感器数据获取)
第二章 硬件开发篇 1.硬件开发全程实录
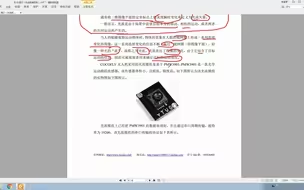
第二章 飞控开发基础篇 9.PWM(电机控制)
第二章 飞控开发基础篇 7.SPI(气压计数据获取)
第四章 OpenWrt开发实战 2.应用程序的编写和编译
第四章 飞控开发高级篇 1.飞控整机代码走读、编译与烧写
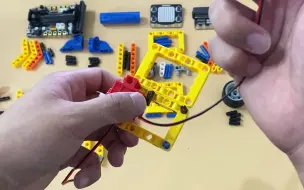
积木手臂安装
第一章 快速上手篇 1.开发套件介绍及测试
第一章 整板测试 1.开发板功能演示及资源简介
第二章 开发环境准备 7.Uboot的编译、测试及烧写注意
第四章 蓝牙BLE通信篇1.收发实验
第二章 飞控开发基础篇 5.串口(视觉数据获取)
第一章 快速上手教程 1.开机测试及硬件资源介绍 (飞机、遥控、cocobit)-1
小飞车安装
光敏传感器
第二章 基础实验篇5.ADC模数转换实验
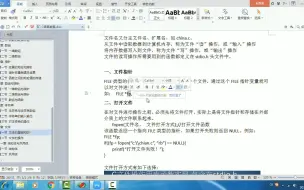
第十章 文件2.文件的操作
第一章 入门篇 1.MTK开发之环境配置
第二章 软件基础篇 7.C++语言基础
第三章 遥控器开发实战教程 3.ADC(摇杆控制)
1.机器人组装
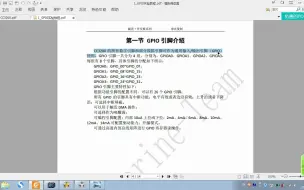
第二章 开发实战1.蓝牙手表之GPIO编程
5.串口控制舵机
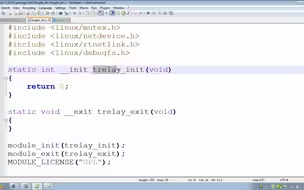
第四章 OpenWrt开发实战 3.驱动程序的编写和编译
第三章 遥控器开发实战教程 2.中断(按键检测)
第二章 飞控开发基础篇 4.串口(光流数据获取)
第一章 快速上手教程 4.OpenMV视觉固件烧写
遥控赛车手柄
第七章 指针1.变量的地址和指针
电子体重计
第十章 文件1.文件的基础知识
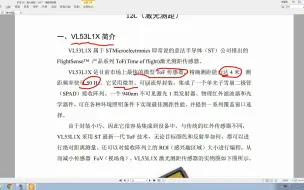
第二章 飞控开发基础篇 8.I2C(激光测距)
第二章 寄存器基础实验7.SPI实验
1.整机功能演示
报晓的公鸡
第一章 入门篇 5.MTK编程之入门
搬运达人安装
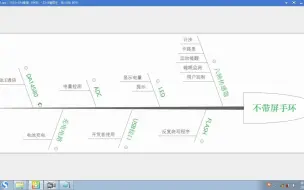
第一章 开源可编程-不带屏手环1.需求分析与整机测试
第二章 基础实验篇1.CC3200_GPIO实验
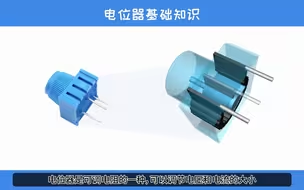
电位器