V
主页
5.串口控制舵机
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
4.舵机基本控制
电设电子设计大赛E题 三子棋抓取-柔性二指机械爪抓取。PWM舵机控制,不便于集成控制
第三章 遥控器开发实战教程 3.ADC(摇杆控制)
2024电赛H题,遛电子宠物~
7.多个舵机不同速率转动
(开源)最迷你的ROS2 机器人,自动路径规划、视觉识别、人体检测跟随、手势识别控制、多形态切换(想要资料评论区留言安排!)
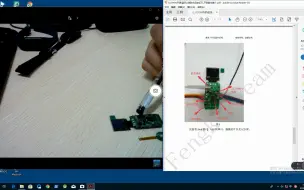
1.机器人组装
6.外部Flash读写
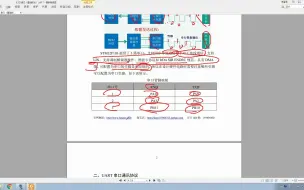
第二章 飞控开发基础篇 4.串口(光流数据获取)
机器生活,机器人爱上女主人,每天给女主按摩
第四章 飞控开发高级篇 1.飞控整机代码走读、编译与烧写
疯壳人形街舞机器人开发实战 4.舵机基本控制
第二章 飞控开发基础篇 3.串口(基础收发)
说起来你可能不信,我用纸做出了迪迦里的机器人哥布纽
卡斯阿姨被神奇大白机器人奖励三天三夜,彻底沦陷(马
1.整机测试
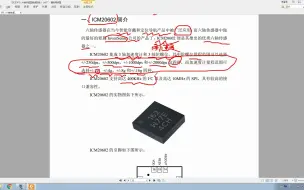
第二章 飞控开发基础篇 6.SPI(六轴传感器数据获取)
第一章 快速上手教程 1.开机测试及硬件资源介绍 (飞机、遥控、cocobit)-1
【爱死亡机器人】第一季:幸运13
本科阶段最后一次竞赛Vlog——2024年智能车大赛智慧医疗组
第二章 飞控开发基础篇 1.GPIO(LED航情灯、信号灯控制)
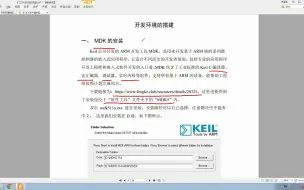
第一章 入门篇 1.MTK开发之环境配置
3.外部Flash读写
大部分打工人最终的结局,早已注定
疯壳AI开源编队无人机开发实战 2-5 串口(视觉数据获取)
光敏传感器
疯壳人形街舞机器人开发实战视频
舵机
第四章 飞控开发高级篇 3.定高、定点、悬停(从解锁开始讲流程)
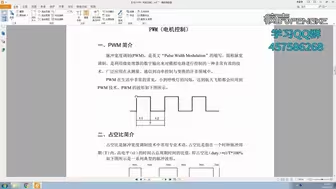
疯壳AI开源编队无人机开发实战 2-9 PWM(电机控制)
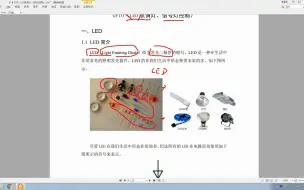
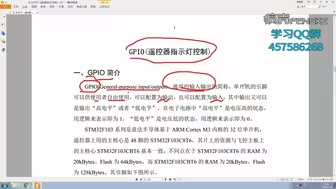
疯壳AI开源编队无人机开发实战 3-1 GPIO(遥控器指示灯控制)
第二章 飞控开发基础篇 10.PID基础原理
第二章 基础实验篇5.ADC模数转换实验
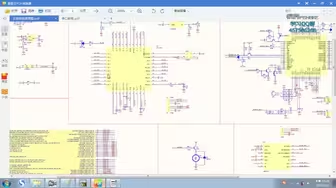
第一章 整板测试 1.开发板功能演示及资源简介
第一章 快速上手教程 3.开发环境搭建
5.OLED屏幕显示
你可以不赞,甚至可以不看,但一定要记得收藏!
ARM双处理器手机开发板3.2 蓝牙协处理器之串口
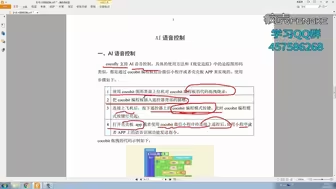
疯壳AI开源编队无人机开发实战 4-6 AI语音控制
疯壳AI开源编队无人机开发实战 4-5 视觉追踪