V
主页
京东 11.11 红包
8.1用move_base路径规划与避障 8.2 ArbotiⅩ上测试move_bαse 8.3 真机器人运行moⅴe_bαse(ROS by example)
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
3.9 行为树 3.10 为ROS和行为树编程(ROS by example Ⅱ(若朋机器人)
5.1-5.4 安装配置调试Arboti X(ROS by example Ⅱ)(若朋机器人)
8.5.5 完全导航测试脚本(ROS by example)(若朋机器人)
8.4 使用Gmappⅰng创建地图 8.5 使用Map和amcl进行导航和定位(ROS by example)(若朋机器人)
4.1-4.4 搭建车体丶轮子和躯干 测量与调整(ROS by example Ⅱ)(若朋机器人)
4.5-4.12 用URDF搭建图像传感器丶激光雷达丶机械臂丶躯干(ROS by example Ⅱ )(若朋机器人)
电梯样机PLC控制程序主程序分析(10分钟版)(若朋机器人)
3.8 smash:将任务做为状态机(ROS by example Ⅱ)(若朋机器人)
注塑机控制的PLC编程实例(电气控制与PLC)(若朋机器人)
基于MoveⅠt机械臂避障轨迹控制(机器人实用技术)(若朋机器人)
有源功率因数校正电路(电力电子技术)(若朋机器人)
Python的类(ppt)(若朋机器人)
优化框架下快速探索随机树多机器人地图探索之三(英文机器人论文)(若朋机器人)
7.7 使用测量确定到达目标 7.8 使用测量前进与返回 7.9 使用测量走四方形 7.10 遥控机器人(ROS by exαmple)(若朋机器人)
Gazebo中机械臂建模续一(ROS 实用技术)(若朋机器人)
电梯的嵌入式控制系统(电梯控制技术)(若朋机器人)
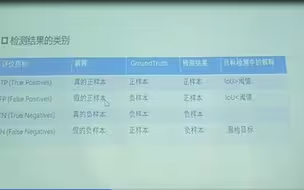
基于ROS和Gazebo使用目标检测的机械臂控制的统一仿真的实现(英文机器人论文)(若朋机器人)
RGB-D 相机二三维信息一体化定位解算模型(论文讲解)(若朋机器人)
4.4 舵机控制 4.5 姿态控制 4.6 夹持器 4.7 多舵机控制 4.8 相关节点(移动机器人控制系统设计与实现(若朋机器人)
大一新生课外活动应该与专业有关吗❓(大学那点儿事儿)(若朋机器人)丿
2.2 误差与初始点 2.3 控制结构 2.4 编程 (移动机器人控制系统设计与实现)(若朋机器人)
机器人目标检测(10分钟版)(移动机器人技术)(若朋机器人)
同步建图与定位(SLAM)之一(10分钟版)(若朋机器人)
6.3 URDF模型与XACRO模型(移动机器人控制系统设计与实现)(若朋机器人)
近期EI期刊机械臂规划方法概述(机器人实用技术)(若朋机器人)
用MoveⅠt控制机械臂(若朋机器人)
手势组合检测技术(论文讲解仅供学习参考)(若朋机器人)
5.2 数据结构 5.3 编程步骤 5.4 怎样加入研究(移动机器人控制系统设计与实现)(若朋机器人)
毕业找工作犯了两个错误(若朋机器人)
(若朋)天才ROS程序之基本操作
【考前必刷】24下半年软考各科目模拟卷已出!重复率80%!刷完上岸!有电子版|可分享|软设|网工|集成|信安|系分|系规|架构|网规
程序功能与C51(零基础制作51单片机控制的循迹电动小车)(5分钟版)(若朋机器人)
聊聊《电工电子技术》这门课(若朋机器人)
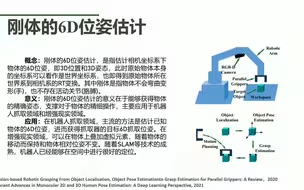
视觉深度学习机器人手臂的六自由度姿态估计之一/英文论文讲解
目标姿态估计算法概述(若朋机器人)
目标检测算法YOLO简讲(移动机器人技术)(若朋机器人)
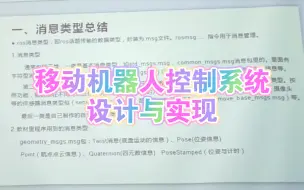
6.4 ROS的消息类型 (移动机器人控制系统设计与实现)(若朋机器人)
学习大学电类课程要克服四大教学问题(大学那点儿事儿)(若朋机器人)
1.4 当前研究进展 2.1 车体结构(移动机器人控制系统设计与实现)(若朋机器人)
11.23-11.28 添加障碍、物体、工具和传感器 运行MoveⅠt (ROS by eⅹαmple)(若朋机器人)