V
主页
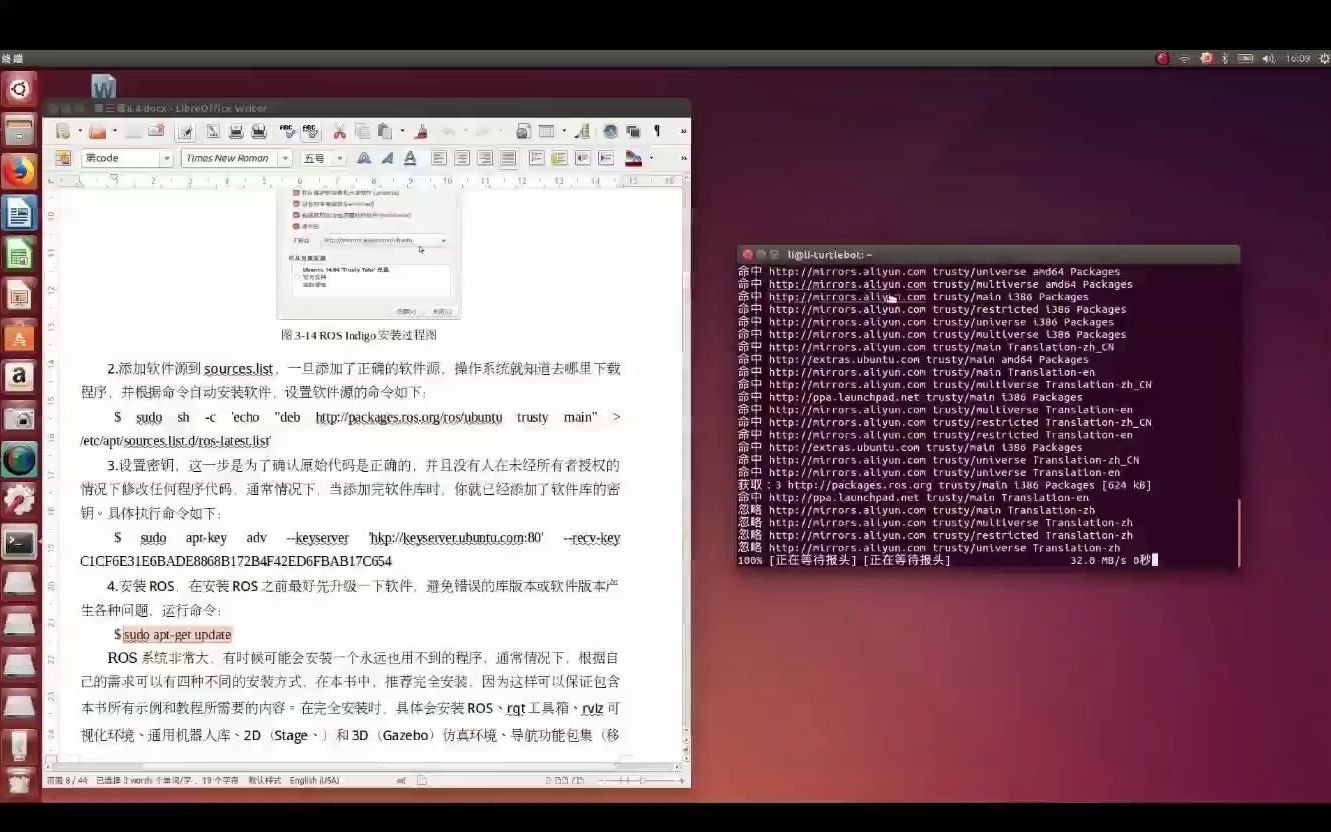
3.2 ROS安装1
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
3.2 ROS安装3
3.2 ROS安装2
(预览)3.2 ROS安装
5.3 ORBslam2安装2
5.3 ORBslam2安装1
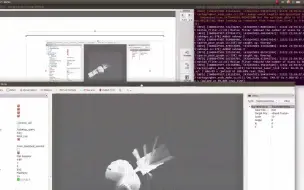
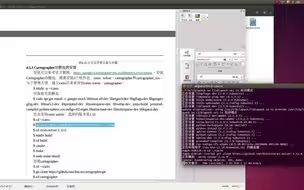
4.8 cartographer安装5
3.11turtlebot安装6
3.11turtlebot安装3
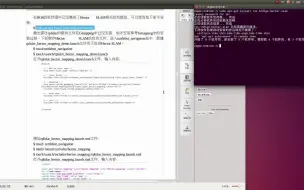
4.8 cartographer安装1
4.4 gmapping安装1
4.4 gmapping安装2
2.4粒子滤波算法1
4.8 cartographer安装9
5.1 monoslam安装2
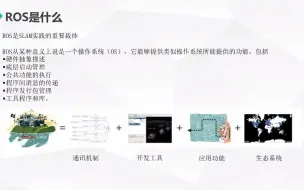
1.1ROS简介2
4.6 hectorslam安装
1.1ROS简介1
4.8 cartographer安装3
4.8 cartographer安装2
3.8 消息文件的创建及使用1
4.8 cartographer安装4
(预览)1.2ROS简介
3.9 服务文件的创建及使用2
4.3 rplidar安装
3.11turtlebot安装4
3.8 消息文件的创建及使用4
5.1 monoslam安装3
3.11turtlebot安装1
5.1 monoslam安装7
5.1 monoslam安装1
5.6 kinect2安装
3.11turtlebot安装5
3.1ubuntu安装
(预览)3.4 创建ROS功能包及功能包编译
(预览)5.5 ORBslam在ROS配置
4.8 cartographer安装8
3.14 机器人跟随功能安装实现1
5.1 monoslam安装5
2.1贝叶斯公式3
3.11turtlebot安装2