V
主页
京东 11.11 红包
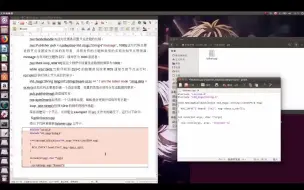
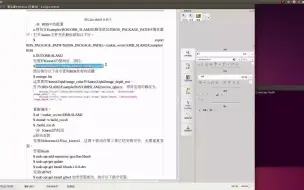
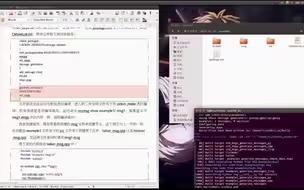
3.9 服务文件的创建及使用2
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
(预览)3.9 服务文件的创建及使用
3.9 服务文件的创建及使用1
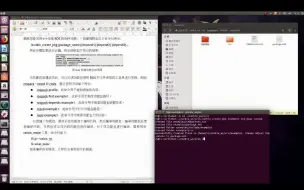
3.8 消息文件的创建及使用4
3.8 消息文件的创建及使用2
3.8 消息文件的创建及使用1
3.8 消息文件的创建及使用3
3.3 创建工作空间
3.5 ROS节点的使用
5.3 ORBslam2安装1
3.11turtlebot安装6
3.7 节点的创建和编译2
3.2 ROS安装2
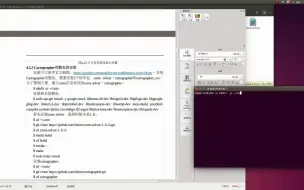
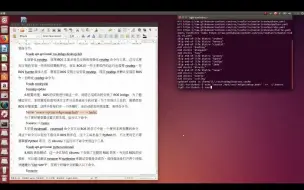
4.8 cartographer安装1
5.3 ORBslam2安装2
3.7 节点的创建和编译1
3.2 ROS安装1
3.4 创建ROS功能包及功能包编译
3.2 ROS安装3
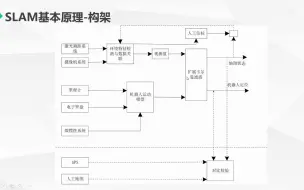
1.2slam模型1
5.7 kinect2标定2
4.8 cartographer安装9
2.4粒子滤波算法1
4.1 rviz介绍3
3.11turtlebot安装5
3.11turtlebot安装3
(预览)3.4 创建ROS功能包及功能包编译
4.8 cartographer安装6
3.11turtlebot安装2
5.1 monoslam安装2
5.1 monoslam安装6
4.8 cartographer安装2
5.5 ORBslam2在ROS配置1
3.11turtlebot安装1
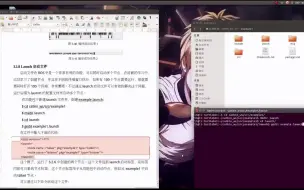
3.10 Launch启动文件
(预览)3.8 消息文件的创建及使用
2.7PHD-slam仿真
5.1 monoslam安装7
3.12 机器人底盘测试
5.1 monoslam安装4
3.11turtlebot安装4