V
主页
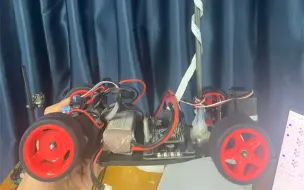
前轮是不对称的,摄像头是歪的,电机是自带差速的,这逆子是调不了一点了..
发布人
没有传承没有天赋的我该何去何从呢..?
打开封面
下载高清视频
观看高清视频
视频下载器
这破车调不了一点,争取拿国二收工回家
“国一”稳了
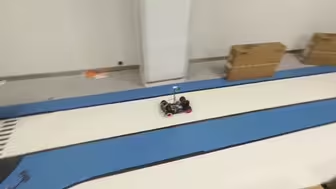
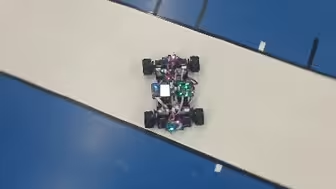
46.5米的赛道,13.5s跑完,3.44m/s徒弟终于过3m4大关,再接再厉,19届镜头组取得好成绩。
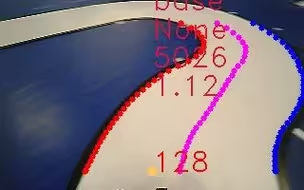
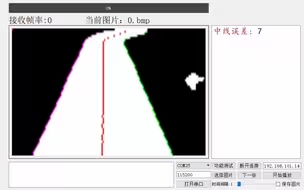
试用种子生长法巡线,写完十字下地2.5m/s
加陀螺仪的小车果然直
憨憨学妹没读国赛规则调一早上车以为自己完赛了
大一上手,今年算是G了
用小米电机整点活
18届完全模型
智能车解决圆环!直立冲两米五!
3m/s的洒水车
“已弃赛考研”
飞思卡尔智能车摄像头C车3米2
学的太杂C,单片机,python,OpenCV,C++,QT样样稀松该咋办?
无刷不炸就是win
卧槽!惊现四米室内神车! 究竟是何方大佬?
漂移算法
省赛被爆杀,速度提不上去了,各位大佬怎么办
各位有没有好用的速度策略,感觉3m好勉强
假圆环,真摆烂(´・д・`)
PID自平衡独轮车(Arduino版,成本30元)
【国奖开源】反正已经被倒卖了,不如免费分享给有需要的人
玩电子DIY别花这些冤枉钱
智能车全向组之三岔路暴毙
学妹说车这么抖,再慢就不礼貌了
十九届摄像头终于跑起来了
19届ccd起步
学弟2.0就装逼,怒改一晚上2.8打压一下小学弟
学妹调了两天,终于跑起来了
第十八届-全国大学生智能车比赛—负压电磁匀速3.8米每秒,赛道31米。二十来天3个小伙伴们更新了十几代车模!三辆匀速3.8!
国赛出名单前最后一跑3.5m/s
好久没发视频了,跑个摩托吧
[自制]桌面级轮腿机器人--基于FOC电机和LQR算法[开源]
恭喜19届智能车学生突破3m大关,希望老弟明年拿个好成绩
终于可以踢踢啦,泰裤辣
今天520,女朋友帮我把小三轮全元素提到2m5嘿嘿
十九届智能车摄像头小白蹒跚起步啦
最丝滑的电磁组,超第二名2秒(老视频)。
备战19届多车,沁恒有点难用,裸片加主驱一体真麻烦
当一个新生被逼到极限时能在4小时内从零做出这种事。