V
主页
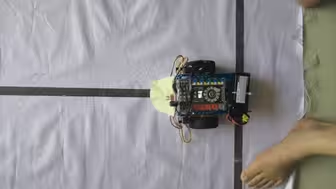
加陀螺仪的小车果然直
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
陀螺仪闭环 小车走直线转直角弯
陀螺仪+pid算法实现底盘朝向固定
[记录]STM32陀螺仪控制小车走直线,90度转弯 初探还不怎么会用,后面尝试一下闭环PID控制,以后用到的地方挺多,希望能用上。
三轴陀螺仪可以矫正姿态
征服陀螺仪第一期,陀螺仪自恢复小车
简单试了一下角度环
串级PID控制,速度环,转向环,角度环(GY521),巡线〖开源〗
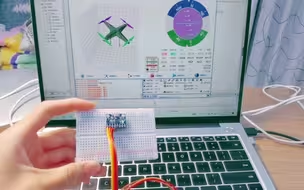
基于STM32F103的MPU6050姿态跟随舵机云台
PID巡线
MPU6050(DMP)简单读一下数据
陀螺仪结合PID对小车直线行驶进行纠偏
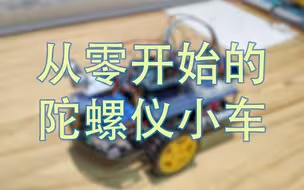
从零开始的陀螺仪小车
陀螺仪还可以这样用?用陀螺仪来动态补偿直线行驶!
翻到五月份没上陀螺仪的视频,配重太多了,猛猛翘头
【PID】STM32F103C8T6循迹小车
智能语音蓝牙遥控手柄避障循迹陀螺仪转向小车
陀螺仪加速度计MPU6050模块应用!加上卡尔曼滤波果然就不一样。
陀螺仪好用捏😋
用PID技术控制小车跑直线
stm32多级菜单——0.96oled
为什么小车难以走直线
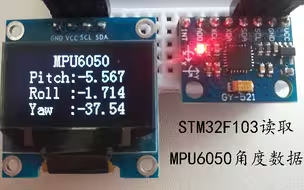
STM32读取MPU6050角度数据
平衡车!
Pid,陀螺仪航向角闭环控制小车如何走直线
感觉更容易打滑了!
MPU6050陀螺仪+舵机云台控制
前轮是不对称的,摄像头是歪的,电机是自带差速的,这逆子是调不了一点了..
如何让麦克纳姆轮小车走直线
我的飞控动起来了!stm32主控+mpu6050加速度传感器+esp8266WIFI模块遥控
如何处理电子陀螺仪MPU6050的零点漂移问题
10天学完江科大的stm32 学会的基本外设 开始尝试做了个智能小车
麦克纳姆轮全场定位算法展示
灰度yyds
当程序员无聊时...
陀螺仪丝滑转向环,可任意角度旋转
pid位置环,陀螺仪闭环,旋转90-180度
串级PID~小车直线行驶
五天速通平衡步兵
麦克纳姆轮小车!兼容阿克曼转向结构,一个会跑STM32/51单片机开发板!
MPU6050