V
主页
京东 11.11 红包
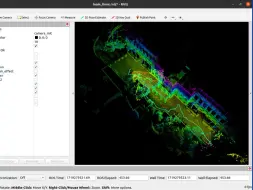
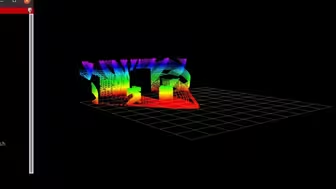
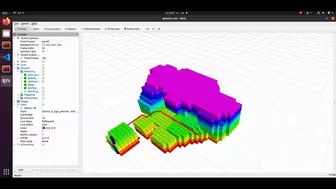
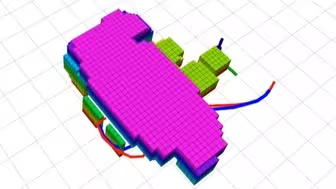
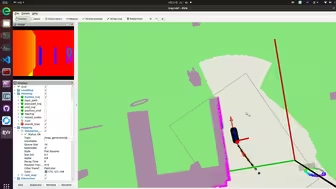
2023.3.17 基于PRM与DWA的机器人动态避障和路径规划算法
发布人
1.使用PRM算法进行路径规划,绿色折线段位所规划出的轨迹 2.使用DWA算法进行动态避障,红色线和蓝色线为机器人飞行轨迹 3.图中蓝色曲线为路人机器人,其余为主体机器人,当前只能实现主体机器人动态避障路人机器人,无法实现主体机器人之间的避障,其原因在于当前假定路人机器人未来轨迹可知 4.黑线点为障碍物点,是对GLB格式图数据进行栅格化后所得到的结果
打开封面
下载高清视频
观看高清视频
视频下载器
2024.6.25-激光SLAM:Faster-Lio 算法编译与测试
2024.7.2-保留障碍物建图
IEEE顶刊:水下机器人AUV路径规划和MPC模型预测控制跟踪控制(复现)
【Air3S】👻幽灵避障👻
2024.6.4 minisnap轨迹
轮足机器人|平衡步兵动态障碍物导航避障
2023.4.7 电机转向与转速调整实验(基于Arduino+L298N+霍尔编码器+直流电机+电池)
我国无人机操作员缺口高达100万人
2024.4.22 Simple Stereo Visual Inertial SLAM
2024.6.21-激光雷达点云仿真与CustomMsg格式转换
2024.5.30 Astar路径规划
2024.6.3 Bspline规划
机器人也会打篮球?SkillMimic港科大联合宇树清北等一众顶级学府提出一种通过演示学习可重复使用的篮球技巧
论文复现:MPC-D-CBF (基于动态屏障函数的移动机器人balabala的模型预测控制)
2024.6.7 小型无人机测试
穷鬼大学生怒肝720小时!从底层到算法自制激光雷达+IMU融合的自主导航小车震撼演示
把玩 HybridAstar -- 双向搜索初步
2024.7.17-双无人机矩形轨迹飞行
当地时间10.21日,土耳其军事公司Tai研制的隐身无人机ANKA-III 完成首次投弹实验
直接钻林子试试看dji AIR 3S的跟随以及避障,差点翻车,不过雀食蟀
挑战全网续航最长的大疆air3s,能否突破一小时大关?
卧槽!这么好的【无人驾驶技术】全套教程不能只让我一个人学习,感知实战、视觉定位、路径规划、预测系统,翻遍全网找不到比这更详细的了!!!(自动驾驶/人工智能AI)
03_路径发布节点解读-2
2D Fast-Planner+MPC跟踪+Perception Aware
【暂时放弃的方案】RACER+倒置激光雷达自主探索无人机测试
⚡️勇⚡️敢⚡️去⚡️炸⚡️
IEEE'24 | 最小成本!安全协作!异构无人机飞行的路径规划新策略!
未知环境在线运动规划
深度解析 —— RQ-4全球鹰无人机
混合A*实现
大疆RC2遥控器一定要捏着打杆吗?
台风潭美的未来大致走向
乌克兰无人机携带左轮枪式旋转投弹挂架
无人机首秀沙特后打消了众多老外的质疑,中东多国竞相邀请去表演
国产反无人机利器-硬杀伤能力的高能激光战车
四旋翼串级pid姿态控制
2024.7.18-radar2lidar标定
北京地铁规划20
Diffusion-based Path Planner for Synthesizing Trajectories Applied on Quadruped
2024.6.26-Faster-Lio与Fast-Drone-250联合仿真