V
主页
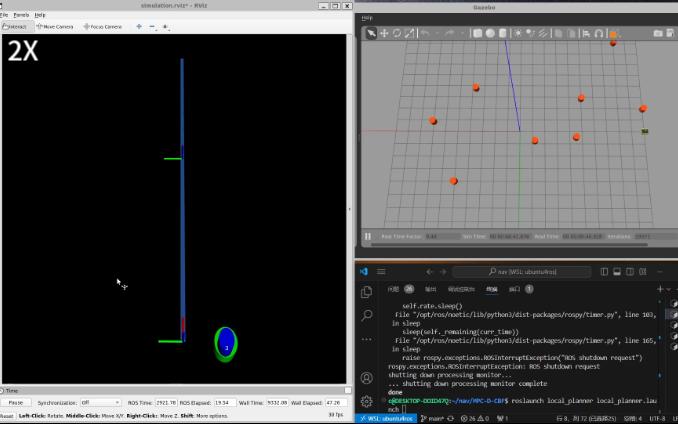
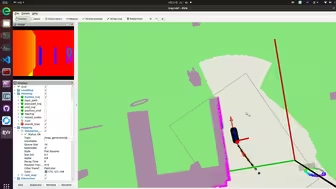
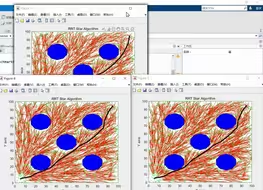
论文复现:MPC-D-CBF (基于动态屏障函数的移动机器人balabala的模型预测控制)
发布人
花了一天时间跑通了! 原论文是 MPC-D-CBF: Dynamic Control Barrier Function-based Model Predictive Control to Safety-Critical Obstacle-Avoidance of Mobile Robot 原作者大佬没怎么说明怎么把代码跑起来orz,有一点点东西需要自己补充。稍微排除了一下过程中可能踩的小坑,如果需要复现可以参考 https://github.com/zm-3171/MPC-D-CBF :)
打开封面
下载高清视频
观看高清视频
视频下载器
[复现]基于MPC模型预测控制水下机器人AUV路径规划及轨迹跟踪仿真
多决策智能体的运动规划——上海交大董伟老师与荷兰代尔夫特理工Javier老师深度讨论
【中英字幕】强化学习和模型预测控制18讲!四大名校教授精讲模型预测控制、最优控制、强化学习入门
基于地形的路径规划案例
Multi-robot Task Allocation and Path Planning with Maximum Range Constraints
RA-L 2024 | CDM-MPC 结合质心动力学和模型预测控制的人形机器人连续跳跃
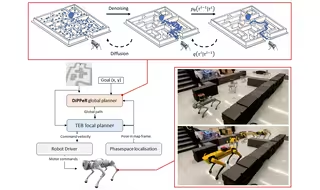
[ICRA 2024] DiPPeR: Diffusion-based 2D Path Planner applied on Legged Robots
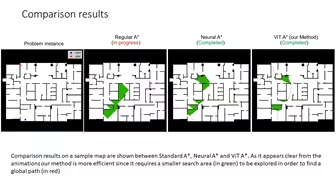
[Humanoid 2023] ViT A*: Legged Robot Path Planning using Vision Transformer A*
IEEE顶刊:水下机器人AUV路径规划和MPC模型预测控制跟踪控制(复现)
终于走上波士顿动力的技术路线了,算法很强,软件很难调。ocs2质心动力学MPC+WBC,6自由度的腿也调好了,加上了碰撞约束,参数还没细调,能够行走1m/s多。
MPC-VSG模型预测控制和虚拟同步机控制并网逆变器
2D Fast-Planner+MPC跟踪+Perception Aware
「精校熟肉」Optimal Control-最优控制(CMU 16-745) 2024-L1-导论与动力学回顾
终章,暂告一段
ocs2的6自由度终于调出来了,目前仅仅是质心动力学mpc的效果,还没加碰撞的约束,两脚打架了,后面会逐步加wbc,加上身
scan context for relocalization 基于scan context的全局重定位
「精校熟肉」欠驱动机器人学(MIT 6.8210) 2024春-L1-机器人动力学与基于模型的控制
STD重定位-STD relocalization
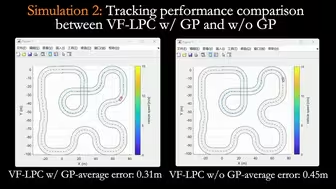
向量场引导的无人车学习预测运动规划算法
MIT humanoid9月最新的whole-body NMPC,基于ADMM方法,稳定太强了
具有稳定性和鲁棒性保证的数据驱动模型预测控制
这可能是目前B站唯一讲得完整系统的【无人驾驶技术】教程了,感知实战、视觉定位、路径规划、预测系统带你一次吃透!(自动驾驶/路径规划/强化学习/人工智能)
基于神经网络的船舶轨迹跟踪自适应滑模控制【附参考文献】
最高速度跑到3m/s,ocs2质心动力学
【国庆福利-29.9元购】【36+个MPC程序盲盒】607MPC代码合集-一起来开盲盒吧!
一阶倒立摆LQR, MPC控制,Python, C++源码公开, Gazebo仿真
基于MPC模型预测控制的VSG虚拟同步发电机并网Simulink仿真
01_案例展示
卧槽!这么好的【无人驾驶技术】全套教程不能只让我一个人学习,感知实战、视觉定位、路径规划、预测系统,翻遍全网找不到比这更详细的了!!!(自动驾驶/人工智能AI)
RRT*路径规划算法(1)
【电控算法_8】无差拍模型预测电流控制DPCC离散模型
IEEE'24 | 最小成本!安全协作!异构无人机飞行的路径规划新策略!
04_PID改进讲解-1
IFAC 非线性模型预测控制主旨演讲 8月24日
03_路径发布节点解读-1
03_路径发布节点解读-2
卧槽!这么好的【无人驾驶技术】全套教程不能只让我一个人学习,感知实战、视觉定位、路径规划、预测系统,翻遍全网找不到比这更详细的了!!!(自动驾驶/人工智能AI)
强化学习-自动驾驶路径规划控制决策-sac的高速公路和遮挡场景训练
质心动力学ocs2的MPC+WBC行走0.6
【永磁同步电机模型预测控制】610 用于汽车电力牵引驱动中永磁同步电机(PMSM)速度控制的模型预测控制