V
主页
京东 11.11 红包
Gazebo Harmonic sdf学习——构建轮式差速机器人(2)
发布人
Gazebo Harmonic sdf学习——构建轮式差速机器人(2)
打开封面
下载高清视频
观看高清视频
视频下载器
Gazebo Harmonic sdf学习——构建轮式差速机器人(1)
机器人仿真Gazebo简介
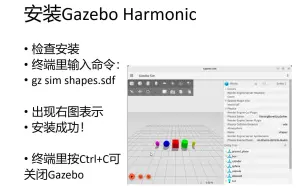
Gazebo Harmonic的安装
从glb复杂格网创建Gazebo3D模型
Gazebo Harmonic GUI功能简介
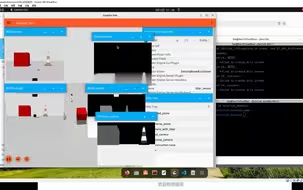
Gazebo 轮式机器人巡线(3)图像采集与处理
Gazebo 轮式机器人巡线(1)简介
Gazebo和ROS2的六足机器人的步态仿真与实现
Gazebo sdf学习——构建桌子
Gazebo Harmonic sdf学习——构建轮式差速机器人(3)话题与控制
调速转台制作
来看看我gazebo仿真的火箭🚀
Gazebo 轮式机器人巡线(2)场景建模
十分钟的ROS2安装方法
3分钟学会ROS2机器人导航Nav2的安装和使用
Gazebo Harmonic sdf学习——构建轮式差速机器人(4)相机传感器
ROS1 noetic的安装
3分钟用Qgis计算植被指数(NDVI)
2024-11-04 机器人时代
机器人模型的选择urdf,xacro,sdf
5. 自定义控件——红绿灯与paintevent事件
地理空间数据分析基础——Geopandas
pyqgis3.03矢量图层的存取
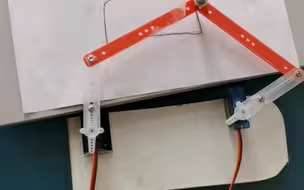
sg90舵机制作的scara双臂机器人模型
前后桥转向六轮式无人底盘(底盘玩家)
12.Qgis打印布局之工具
pyqgis4.02符号化
3.利用QSS进行QWidget控件外观的改变
后弯轮式四步曲第三步找到卷脊柱的力,做一个做一个完整的轮式,这个轮式做好可以转反蝗虫,对反跳有帮助
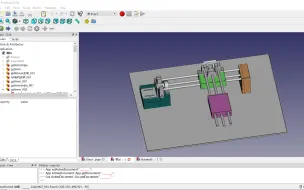
freecad学习_4初识freecad_桌子建模以及安装三方工作台
pyqgis2.01
freecad学习_2初识freecad_8mm光轴支架
ROS2让小乌龟螺旋运动
pyqgis3.05矢量图层要素的编辑
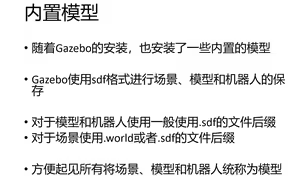
Gazebo Harmonic内置模型以及sdf格式简介
从blender导出新一代gazebo模型
freecad学习_1初识freecad_42步进电机固定片支架
1.12 实验1.5数组的操作-Numpy基础
freecad学习_2初识freecad_42步进电机支架
【第一次看终结者2】电影Reaction | 不就是眼泪吗,你拿去就是了🕶️