V
主页
Robot Parkour Learning -- 基于强化学习端到端的跑酷机器人
发布人
篇论文的核心观点是关于如何让机器人学习并执行跑酷动作,这是一种需要高度灵活性和敏捷性的运动。跑酷通常包括跳跃、攀爬、穿越障碍等动作,对机器人的腿部运动控制系统提出了很大的挑战。 跑酷是一种高度动态和复杂的运动形式,对机器人的自主运动提出了巨大挑战。机器人需要能够感知环境并实时做出反应,以克服各种障碍。如何让机器人学习并执行多样化的跑酷技能,同时保证这些技能是视觉驱动的,即机器人能够通过视觉输入来指导其运动。使用强化学习算法来训练机器人,使其能够通过与环境的交互来学习最优策略。直接配方法:一种优化方法,用于生成连续的控制策略,这里被用来生成跑酷技能。机器人直接从视觉输入到运动控制的映射,无需额外的中间表示。感知模块:使用机器人自身的深度相机来获取环境信息。决策模块:基于感知信息,机器人需要做出决策,选择最佳的跑酷技能。运动执行模块:将决策转化为实际的运动,如跳跃、攀爬等。奖励机制:设计简单的奖励函数来引导机器人学习有效的跑酷策略。 策略优化:通过不断试错,优化机器人的决策策略,以获得更高的累积奖励。
打开封面
下载高清视频
观看高清视频
视频下载器
这真的太像真人套壳了!挪威机器人公司发布家用机器人1x NEO
UniAD-经典的端到端自动驾驶网络设计
Figure 02 重磅来袭!人形机器人开始制造汽车!
5款机器人“0元购”,图纸代码全开源!稚晖君:人人都是钢铁侠
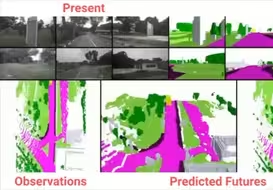
自动驾驶生成式未来时刻到来!
OccSora在自动驾驶领域提出了一种新的模拟方法,通过4D占用生成模型来更好地理解和预测驾驶场景的时空分布
BEVFusion 论文效果
DriveVLM-通过结合视觉-语言模型(VLMs)来提升自动驾驶车辆的场景理解与规划能力
端到端自动驾驶超视距感知能力获得--- Map as Sensor(自动驾驶之星社区活动)
面对量产的自动驾驶无图技术路线--- CVPR2024 无图驾驶挑战赛参赛方案解读(二)
RobotSketch: 腿式机器人超快速设计的交互式展示|SIGGRAPH 2024【韩国科学技术院】
【具身智能】iRonCub3 机器人开始学习飞行技能
攒钱买机器人养老计划正式启动!
国内的机器人已经可以小跑了,特斯拉的机器人为什么还在玻璃柜里陈列着?
【S3】中文字幕|They Built This Robot For Your Home | 1X Technologies
波士顿动力人形机器人 Atlas | 强大的运动能力 夺回全球第一 | 宇树科技 波士顿动力回应你们了 | 机器人 | 智能机器人 | 人形机器人 |
拥有仿生肩胛骨的人形机器人
在世界机器人大会,我和机器人“打了一架”
傅利叶GR-2,不止是颜值。
智元机器人0818
【具身智能】2024 智元远征A2-长距离行走
面对量产的自动驾驶无图技术路线--- CVPR2024 无图驾驶挑战赛参赛方案解读(一)
国产顶尖AI机器人再进化!烘焙弹琴泡茶打咏春...家务、才艺全精通!!
【号称地表最强人形机器人Figure 02问世!每天工作20小时 具备视觉&语音推理能力,01已经工厂,02将怎样?】
OccWorld--面向自动驾驶未来的3D占用世界模型新方案
多种步态稳定行走,丝滑切换转身站立
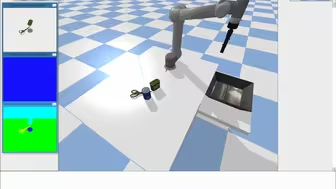
具身智能仿真演示
中国逐际动力人形机器人 CL-1 | 替代人类仓库搬运工 | 机器人赚钱的时代来了 | 机器人 | 智能机器人 | 人形机器人 | 人工智能 | 具身智能
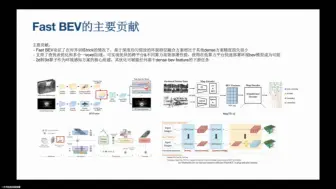
FastBEV 网络的主要贡献---(自动驾驶之星第一次线上活动--《 中低算力平台友好的环视特征融合方案》)
宇树科技人形机器人 H1 | 商业化的挑战 开源能解决吗 | 全球人形机器人商战已开启 | 机器人 | 双足机器人 | 智能机器人 | 人工智能 | 具身智能
灵巧手,进化!
被国产机器人硬控三分钟:非洲记者中文寒暄,机器人双语热聊
直击WRC|逐际动力人形机器人CL-1现场再现通用移动操作
Offer收割机之具身智能公司智元机器人
【具身智能】2024 智元远征A2-交互服务场景
只玩真实!世界机器人大会上碾压铁模特,乐聚机器人夸父线下再现宣传片全技能
具身智能领域最容易落地的方向-遥操作
先天打工圣体!国产机器人仓库开干,搬8公斤动态超稳
不止是央视的焦点,还成为香港TVB的明星!三分钟带你见证 Galbot 的成长经历!
地表最强 没有之一 | AI机器人 星尘智能S1 | 教你 咏春 跳舞 | 帮你 喂猫 扫地 | 为你 做饭 煮茶 奏乐 | 还能打篮球 | 保姆机器人