V
主页
端到端自动驾驶超视距感知能力获得--- Map as Sensor(自动驾驶之星社区活动)
发布人
今天特别邀请到斌哥(CVPR,TPAMI 先后发表过高水平论文)给大家带来一期关于超视感知能力的分享! 随着端到端自动驾驶技术的发展,车道线在其中占有举重轻重的地位,BEV 车道线如何实现超视距感知,是一个值得去探讨的话题。今天我们给大家带来相关的分享!
打开封面
下载高清视频
观看高清视频
视频下载器
基于稀疏特征的端到端自动驾驶方案---地平线&清华
从智能化的常见误区窥探智能驾驶的发展方向---自动驾驶之星社区第五次线上活动
特斯拉引爆在端到端技术大解密,分层解耦的端到端自动驾驶系统
ominiDrive--将VLM大模型和BEV算法完美的结合在一起!
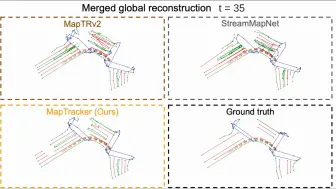
MapTracker
多模态大模型赋能智能座舱--自动驾驶之星活动
我从来不用自己剪视频,因为我会用AI
BEV 网络与Occupancy 之间的关系--(自动驾驶之星第一次线上活动--《 中低算力平台友好的环视特征融合方案》)
面对量产的自动驾驶无图技术路线--- CVPR2024 无图驾驶挑战赛参赛方案解读(二)
一路狂吐槽!号称国产FSD,理想端到端辅助智能驾驶雨夜测试
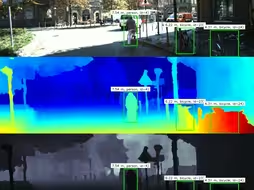
YOLOv8+PSMNet+Deepsort,实现目标检测、追踪和测距!
Nature新研究:大模型越大,越爱胡说八道
DriveVLM-通过结合视觉-语言模型(VLMs)来提升自动驾驶车辆的场景理解与规划能力
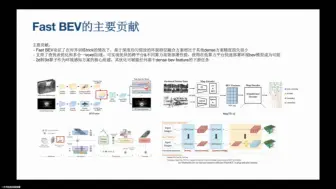
FastBEV 核心设计灵感来源--(自动驾驶之星第一次线上活动--《 中低算力平台友好的环视特征融合方案》
车端感知算法的变迁(自动驾驶之星第一次线上活动--《 中低算力平台友好的环视特征融合方案》)
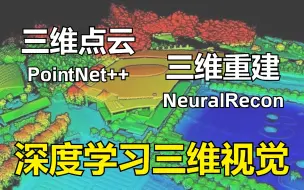
基于深度学习的三维计算机视觉技术:三维点云+三维重建算法讲解与项目实战
是惊喜还是惊吓?号称国产FSD,理想端到端辅助智能驾驶测试
PARA-Drive--一种新的端到端自动驾驶架构!
端到端基础!从原始传感器数据到控制策略
面对量产的自动驾驶无图技术路线--- CVPR2024 无图驾驶挑战赛参赛方案解读(一)
图像分割领域如何水一篇论文,怎样学能快速出结果?UNet/Deeplab/Mask2former/SAM图像分割算法全详解!
强烈推荐!国防科技大学OpenCV图像处理全套教程!终于有人将opencv讲透了!存下吧,比啃书好多了!机器视觉/人脸检测/计算机视觉/人工智能
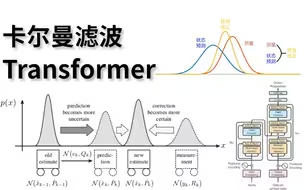
卡尔曼滤波实现目标跟踪,不到一小时轻松学会!
【附源码】2024最全OpenCV练手项目合集,学习计算机视觉图像处理必备,练完即可毕业,超级适合新手小白练手!!
英伟达冠军方案!Hydra-MDP:多模态端到端自动驾驶详解
号称国产FSD!理想端到端辅助智能驾驶测试(V6.3.0 E2E)
【3小时学算法】菜鸟狂喜!全网最全最清晰的【贝叶斯算法】教程,详解贝叶斯分析、朴素贝叶斯,花三个小时带你吃透!机器学习算法_人工智能
真的太全了!计算机视觉入门到精通,图像处理、图像提取、目标检测、图像检索、图像分类、医疗影像一次性学会!三天即可学会
太...太全了!2024最全目标检测YOLO算法教程!YOLOv1v2v3v4v5v7v8v9全系列,计算机博士一次带你学明白!
Transformer技术原理,论文讲解!带你秒懂Transformer底层逻辑原理!真的通俗易懂!(人工智能、深度学习、机器学习算法、神经网络、AI)
OccSora在自动驾驶领域提出了一种新的模拟方法,通过4D占用生成模型来更好地理解和预测驾驶场景的时空分布
草履虫都能毕业!Opencv+YOLO实时目标检测,计算机视觉方向从零到实战,带你做毕设!(计算机视觉/深度学习/Opencv/YOLO)
FastBEV 网络的主要贡献---(自动驾驶之星第一次线上活动--《 中低算力平台友好的环视特征融合方案》)
工业缺陷检测是用传统OpenCV算法还是用深度学习YOLO算法?计算机博士2小时带你吃透缺陷检测实战!
【AI知识分享】扩散模型通用框架保姆级推导第一回:抛开限制,做你自己
深度学习计算机视觉项目实战:基于YOLOv8和PyTorch实现Android手机部署,原理详解+代码实战,大老带你3小时手撕源码!
【图像处理入门到精通】七大算法:图像分割、图像拼接、车辆检测、人脸识别、图像增强、图像修复、边缘检测一次讲完!三天带你从入门到进阶!
草履虫都能学会!这可能是B站最全的(Python+机器学习+深度学习)系列课程了,快速入门巨简单,还学不会来打爆我!/人工智能/机器学习/深度学习/python
基于 LiDAR 的深度学习提取道路特征
【强推】B站最全的【Transformer教程】中科院56集付费课程,最适合新手入门Transformer模型实战系列,绝对通俗易懂!