V
主页
京东 11.11 红包
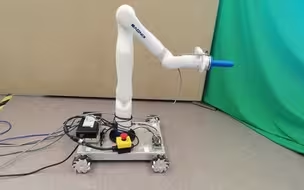
【论文阅读】iCub霍尔元件制的指尖压力传感器A Differentiable Extended Kalman Filter for Object Track
发布人
In this work, we propose a differentiable Extended Kalman filter that can be trained to track the position and the velocity of an object under translational sliding regime from tactile observations alone. 通过一个微分卡尔曼滤波器处理他们设计的霍尔压力传感器,对所加持物体的速度和位置信息进行判断。 A Differentiable Extended Kalman Filter for Object Tracking Under Sliding Regime, Piga, N.A, Pattacini, U. and Natale, L., Frontiers in robotics and AI, 2021. https://www.frontiersin.org/articles/10.3389/frobt.2021.686447/full
打开封面
下载高清视频
观看高清视频
视频下载器
复合机器人末端稳定:Whole-Body MPC for a Dynamically Stable Mobile Manipulator-----ETH
An admittance-controlled wheeled mobile manipulator for mobility assistance(邓宗全)
工程与艺术的融合,之江实验室,钟灵和音乐机器人“晓乐”-机器人弹钢琴
人形机器人,并联结构Whole-Body Control of Series-Parallel Hybrid Robots
人形机器人上半身 RH5 Manus,串并联结构
【搬运】人形机器人贴标签--Robots Doing Stuff #34 - Peeling and Applying a Label
【阿里千问大模型操控机器人】做机械臂其实还是蛮好玩的~嘿嘿
Magnetic Localization and Open-Loop Propulsion
Robot-assisted flexible endoscope remote and autonomous research 天津大学-支气管镜机器人
iCub learns how to play piano
Folding Clothes Autonomously: A Complete Pipeline 双臂叠衣服机器人,家庭通用机器人
带触觉的灵巧手 #SeedRobotics #IROS2024
同心管机器人-用于肾脏手术-Western University
你好ED Atlas!| ED Atlas 来啦 | 波士顿动力电驱Atlas001
【Full version】Outdoor Experiments of the GITAI's G1 robot(2020.8)
为什么发展人形机器人:大家电?Meet Anna™ – The Smart Household Robot
西门子旗下的血管介入机器人Corindus机器人辅助神经介入血管瘤栓塞研究How the CorPath GRX Cassette Works
叠衣服机器人Home Robot Low-Cost Force Controlled Arm---Blue家庭通用机器人
R-One 血管介入手术机器人
Micro robot climbs vertical glass carrying 100 times its weight(爬臂机器人)
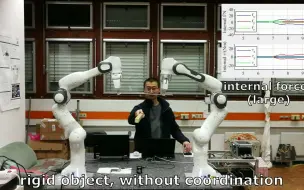
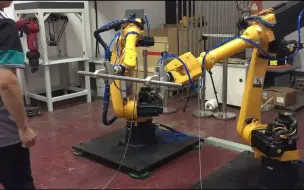
An Optimisation-Based Distributed Cooperative Control for Multi-Robot Manipulati
【搬】双臂变导纳控制(段晋军老师)
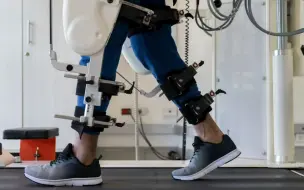
Lower-Extremity Rehabilitation Robots
Draco leg at ONR expo 靠谱的腿
当您同时拥有外骨骼和灵巧手,你就能
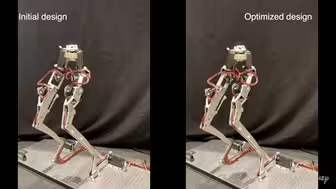
足式机器人的运动学的优化设计【迪士尼】
Admittance control for collaborative dual-arm manipulation
钟灵-机器人晓乐弹钢琴-之江实验室
Robotic folding of a rectangular cloth: competition example【ICRA2023竞赛范例,叠布】
【赛博日报】全新的灵巧手(带触觉)
QDH Bringup Sample
ECCV 2024 HandDGP Camera-Space Hand Mesh Prediction with Differentiable Global
Robotic PCI to RCA lesions, CorPath冠状动脉球囊扩张PCI,经皮右冠状动脉介入术RCA操作
Projected Force-Admittance Control for Compliant Bimanual Tasks
李飞飞【具身智能】-VoxPoser:可组的3D映射地图用于大语言模型的机器人操作
又一国产新锐机械臂公司:谙布尔机器人 AMBER Lucid ONE【自重3.2kg,负载1.5kg】
有点好玩,庭院机器人EEVE Willow 双臂可割草
Introducing the Apollo Humamoid Robot by Apptronik
Dream wedding---played by piano robot【灵巧手系列】
腾讯 Robotics X 实验室自研机器人灵巧手“TRX-Hand”和机械臂“TRX-Arm”