V
主页
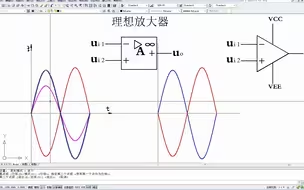
减法运算-负反馈-集成运放
发布人
减法运算-负反馈-集成运放
打开封面
下载高清视频
观看高清视频
视频下载器
集成运放的简单介绍
集成运放的正反馈和负反馈的判断
集成运放的电压反馈和电流反馈的判断
反相-比例运算-负反馈-集成运放
集成运放的串联反馈和并联反馈的判断
多级混合运算-负反馈-集成运放
反相加法运算-负反馈-集成运放
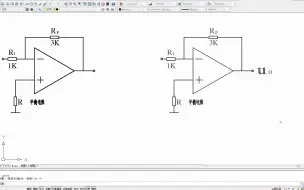
同相-比例运算-负反馈-集成运放
集成运放的虚断和虚短的介绍
三人表决器电路简介
robotstudio的ABB机器人写王字的TCP跟踪
电感L的参数计算实例
ABB主计算机板的简介
机器人码垛-第1步-吸盘从传送带设置取放目标点
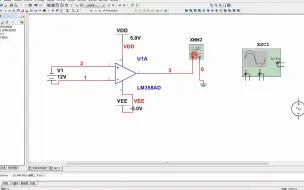
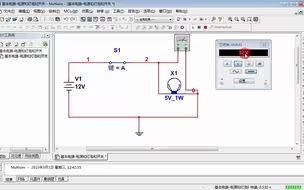
Multisim仿真-三人表决器
吸盘工具的创建及设置-第2步-smart组件创建
robotstudio的程序for循环的简单讲解
robotstudio的ABB机器人的基本运动指令
电子向日葵的电路简介
robotstudio与博图plc通讯及仿真1-博图部分
两级放大电路的电压电流反馈交直流反馈串并联反馈正负反馈的判断
npn三极管的饱和与截止状态的判断
PLCSIM-ADvanced-v3的测试与licenseNotFound的问题处理
robotstudio的吸盘工具坐标的创建的简单介绍
ABB机器人控制柜与本体的连接简介
robotstudio与博图plc通讯及仿真2-robotstudio及联调部分
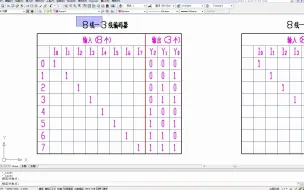
8线-3线编码器简介
数组的理解和运用-7-三维数组在xy方向的运用
传送带的创建及设置-第2步-设置smart组件及参数调整
数组的理解和运用-5-二维数组在xy方向的运用
robotstudio的程序if语句的简单讲解
Multisim14仿真软件的基本运用-电源和开关和灯泡
robotstudio的tcp工具坐标的创建的简单讲解
robotstudio工件坐标的创建的简单讲解
吸盘工件的创建及设置-第1步-导入stp模型及创建工具
机器人-人物素描-仿真动画
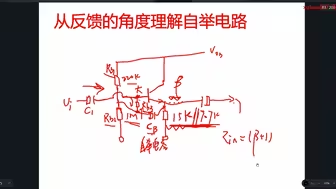
从反馈的角度理解自举电路
robotstudio的ABB机器人IO信号在程序中的简单运用的讲解
触摸屏简易程序的模拟运行
ug绘制-3D莫比乌斯带