V
主页
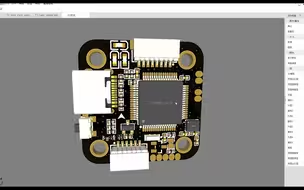
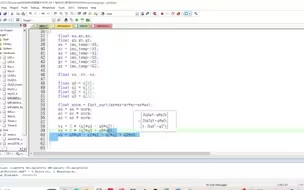
它来了它来了,开源飞控,它带着代码走来了!(对mpu6050解析不理解的,可以看我最新发布的视频)之前做的stm32飞控,现在代码全部开放,欢迎白嫖
发布人
平衡车代码开源:https://b23.tv/EBlZYX 可以加up的开源qq群,群号:246272129(加群请回答问题,否则拒绝加入) 同时,麻烦下载代码,觉得代码有用的小伙伴给up个关注,感谢~ 再说一下,这个程序只是拿来交流学习用的,只有简单的遥控方向和自稳功能,所以请说代码好少,功能好少的人绕个道。 飞控源码:https://github.com/BaldTechGeek/stm32f103_flight_control
打开封面
下载高清视频
观看高清视频
视频下载器
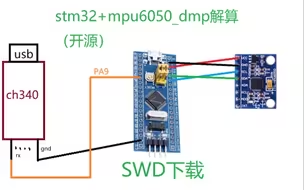
mpu6050_dmp姿态解算,开源,stm32欧拉角解算,代码在视频说明里,欢迎白嫖
小马哥STM32四轴学习平台--DragonFly四轴PCB硬件设计Altium Designer电路设计课程
我的飞控动起来了!stm32主控+mpu6050加速度传感器+esp8266WIFI模块遥控
1.基于pixhawk飞控硬件的stm32开发教程(1)---硬件开发说明
国产开源!5分钟开启飞控算法工程师之路
[ 开源 ] 自制F405飞控 (50元低成本、立创设计免费打样、支持开源飞控固件和二次开发)
DIY初级作品,四轴飞行器,焊好即飞
ESP32四轴飞控,硬件设计完工啦!!开源,开源,开源!!!
四轴无人机:(13)开源万岁
17_STM32开源无人机_SUAV
MPU6050用法-角度闭环-STM32-17.2-借助MPU6050 PID闭环朝指定方向运动和旋转指定角度
小白也能懂的无人机飞控源码讲解
穿越机FPV开源飞控设计,Betaflight开源飞控, 正点原子开源飞控,STM32F405开源飞控
全网首发MPU6050加速度陀螺仪控制4个方向的舵机|附代码
STM32_GPS_飞控教程
[DIY] 不到20元自制无刷四轴飞控(刷Betaflight固件),性能碾压60元的QQ飞控
【浙江大学】浙大博导带你从0制作无人机
飞控课程(四):STC开源飞控代码解析
[小学生都会的]MPU6050DMP库移植(stm32标准库)
从零做飞控(4)IMU加速度计和陀螺仪的互补滤波
四轴无人机:(12)其余代码讲解
[DIY] 尝试自己制作一个F4飞控,全套资料已分享!
【自制飞控】从零开始造四旋翼无人机新手教程——快速实现无人机硬件及STM32编程
使用STM32自制四轴无人机飞控,离 地 了!!!
[DIY] 尝试自己制作一个F4飞控,试飞成功!全套资料在视频简介喔~
【新玩法】MPU6050传感器实现运动跟踪——略有难度
手搓飞控入门第一次课:飞行控制系统的概念
成本80左右的高性价比20孔距F405穿越机飞控,测试后开源
毕设宝典 | 基于STM32单片机的四轴飞行器开发流程讲解
学习心得|基于卡尔曼滤波的MPU6050姿态解算
自制四轴无人机,毕设、电赛专用,机架为F330,飞控为STM32F407,自己写的QT地面站,可PID在线调参,也可进行二次开发,适合初学者。
一种采用inav开源飞控的机械蝴蝶
MPU6050+DMP获取姿态解析
mpu6050三种常见滤波方法的对比|卡尔曼滤波、一阶互补滤波、四元数法
mpu6050互补滤波
自制飞控(教程篇)(飞控成本50以内)
CH32读取MPU6050姿态数据(卡尔曼滤波法)
开源啦 定点悬停四轴无人机
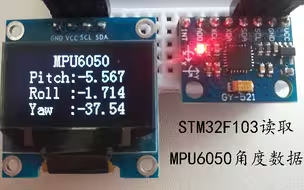
STM32读取MPU6050角度数据
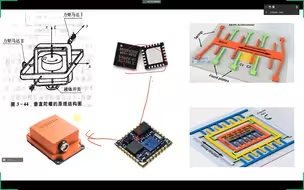
第四章 飞控开发高级篇 1.飞控整机代码走读、编译与烧写