V
主页
【PID】解析各个状态的速度
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
【PID】探究PID的本质
7.2无人机PID参数调试
关于低成本双目摄像头测距的想法
STM32平衡小车
直立环+速度环 稳定不少
【35元双目摄像头】双目测距(VScode)
【PID平衡小车】我参考的UP作品
【修车】09年长安悦翔升降器自锁开关故障解析
智能车软件培训-电机pid参数整合
【自制双目测距】测距原理
PID控制器设计
STM32小车工程模板(HAL库),使用常用模块,好移植,包含常用PID
三菱放卷,用pid调节 伺服控制
工地实操,arduino也能在工厂实用? Arduino工地实际运用
卢瑟福的原子模型
【电子的发现】知识总结
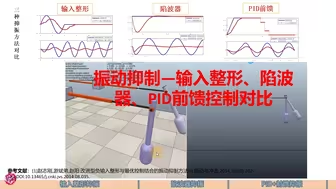
振动抑制—输入整形、陷波器、PID前馈控制对比
【DC/DC】P2:基于模型的 DC-DC 转换器控制算法调参与硬件部署
【趟坑实录】Ben Eater 6502计算机之时钟信号电压对resetd的影响
改变核子数制作各种物质的可能性
Joop Brokking 版本的平衡小车 PID调参
电控组第一次培训
精校熟肉」欠驱动机器人学(MIT 6.832) 2024春-L7-李雅普诺夫分析 I
“我们是来解决问题的”
【平衡小车】寻找启速点
调整完的pid 非常根手 响应不要太好
【自用备忘】炮塔电路 水平电机
Step2:无人机PID参数整定(片段分享,油门只推了18%左右,调参过程太危险了没手录屏)
五寸竞速机装机教学(下)
ESP32 CAM 简单组装应用小例
【目标瞄准系统】硬件连接试验 ESP32CAM 通过4988驱动42步进电机
【探索发现】利用原有线路加装侧视摄像头
【趟坑实录】 dso slam (二)一起定位与地图构建 之 安装DSO 跑通数据集
复活19届ccd,浅調个角度环
铨洲打样CNC车架已验证
「精校熟肉」Optimal Control-最优控制(CMU 16-745) 2024-L5-优化(下)
【尝试单摄像头测距】网上的代码测试
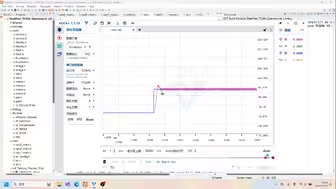
【matlab&simulink手把手教学3.6】控制部分之利用PID模块进行控制器参数整定(PID Tuner)(simulink)
「精校熟肉」Optimal Control-最优控制(CMU 16-745) 2024-L6-确定性最优控制导论
离散增量式PID Simulink建模