V
主页
【自制双目测距】测距原理
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
关于低成本双目摄像头测距的想法
【35元双目摄像头】双目测距(VScode)
【趟坑实录】咸鱼35元双目摄像头之 打开摄像头双目模式 ubuntu
高翔 视觉SLAM十四讲ch5
禁止低效啃书!《清华高翔博士-视觉SLAM14讲》视频教程全集,简直不要太强!
尝试自制双目摄像头【想法】
【尝试单摄像头测距】网上的代码测试
【双目摄像头】网上看到的,可以研究一下
【趟坑实录】 dso slam (二)一起定位与地图构建 之 安装DSO 跑通数据集
optimization pose and rgb points
简易超声波避障车
精确打击•《拿省赛当电赛打?比赛测评前三天才开始调飞机?》
【趟坑实录】 dso slam (一)一起定位与地图构建 之 安装Ubuntu 16.04
【slam】热烈庆祝ORB_SLAM2跑数据集成功!下面马上ROS
【趟坑传】dso slam 一起定位与地图构建 之 前传 效果演示
【激光射击训练靶】粗装完成 介绍一下
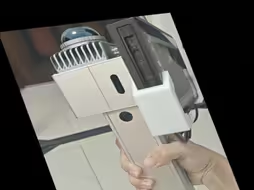
手持slam设备(灵感源自麦克风)
【记录】 导电滑环到位
【趟坑实录】咸鱼35元双目摄像头 标定 c++代码
什么??我们的机器人也会看路了!!!自主导航与避障全新体验~
ESP32CAM WIFI PC 自动瞄准目标火控系统可行性探索 可应用于 模型玩具
雷达视觉双退化环境下fast_livo性能测试(对比fast_lio)
Multi-Session Point Cloud Consistent Mapping
喜报•我方电赛&robocup&江苏省机器人大赛无人机定位精度已达1cm!!!(多日不见,水个视频)
《ROS 2机器人开发从入门到实践》7.3.1Navigation2介绍与安装
Multi-Session Point Cloud Consistent Mapping
《ROS 2机器人开发从入门到实践》7.2.1构建第一章导航地图
《ROS 2机器人开发从入门到实践》7.2.2将地图保存为文件
试验 无限制旋转炮塔 可追踪指定目标
【趟坑实录】Ben Eater 6502计算机之时钟信号电压对resetd的影响
【激光靶】借鉴一下
【熟肉|嘶吼教学】五分钟教你像小猪一样嘶吼
【记录】百元级 低配版 仿“步兵” 机器人
ECCV 2024 oral | 首次基于深度聚类的多模态融合里程计网络
【SLAM】LI-GS: 结合雷达的大场景Gaussian Splatting
自制“吗喽”履带机器人果园闯关实录,昼夜不间断!
Joop Brokking 版本的平衡小车 PID调参
【UE5】(狂人日记)工具包全面更新,刨切/3DUI/载具/热力线/热力高度/文件下载/DLSS/样条范围/测距测面/贴花/规则生成/指南针/镜头操作
追踪目标小车计划备忘
天鸢·入无人之境——基于智能感知和规划的自主作业无人机系统