V
主页
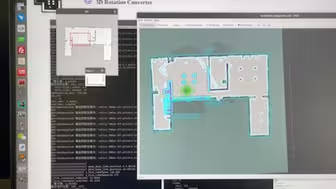
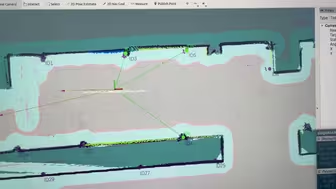
通过充电桩姿态推算移动机器人的当前位置,实现重定位功能。
发布人
通过充电桩姿态推算移动机器人的当前位置,实现重定位功能。qq群: 742679602 【通过向量叉乘计算姿态充电桩姿态 - CSDN App】http://t.csdnimg.cn/ILns0
打开封面
下载高清视频
观看高清视频
视频下载器
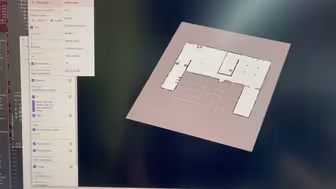
slam导航定位精度达到+-1cm
slam无人车重定位算法研发,目前估计国内我是第一个研发成功这种技术的。
反光柱定位算法(孔雀开屏)
移动机器人里程计算法原理的深度解剖 - 移动机器人里程计算法学科介绍
反光板定位,多点定位
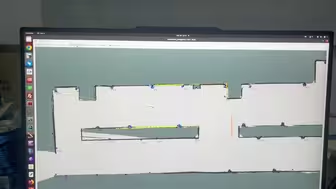
反光柱拟合出圆心,并发布可视化坐标及 ID(有效距离处于 3.5 米范围内,超过此范围点云不再具有圆柱体特征)
反光柱定位算法及自动重定位算法,其计算得出的定位数据在任何时刻都完全不依赖前一次定位数据,成功突破了市面上同类算法需依赖前一次定位数据作为基准的局限。
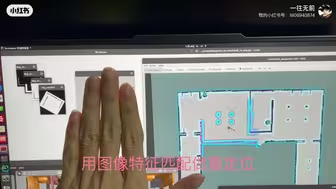
用图像特征匹配做重定位
武科大地瓜机器人基地介绍—在RDK X5上姿态识别(整活版)
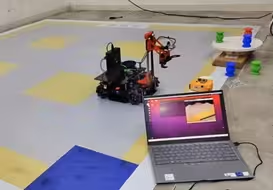
利用充电桩上的反光板引导移动机器人自动回充。
改进版轮腿,增加了腿部强度,内置中空走线
基于反光板回桩充电
日产做出仿生人啦?
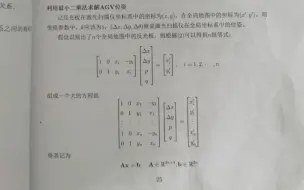
舵轮底盘运动模型已经建立完毕,并验证完成。
我的管道机器人户外测试
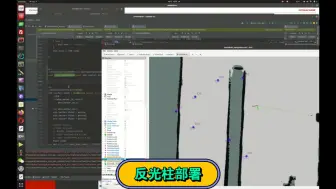
slam无人车基于雷达图像匹配地图重定位代码讲解课程已录制完毕,代码已开源。
反光柱部署简单演示
宋Lev 十个月行驶2W公里,电池健康度96%。免安装在车机上查询电池健康度查询方法 比亚迪
rosweb开源工具ros_rviz
今天把我做的这个机械臂开源
全局路径规划,两点之间没有障碍物是用直线插值方式计算全局路径,两点之间有障碍物走A*规划全局路径。
各国网友看到机器狼后的表情都绝望了!
【开源】百元价格就能实现学习ROS和SLAM导航的口袋式桌面机器人!
【桌面智能机器人】情绪反馈,语音对话,复刻成功!
slam无人车通用底盘系统工具1
模拟运动时发生定位绑架问题后的重定位算法实现
【灯塔工厂 pro max!】库卡机器人助力美的洗衣机点亮绿色未来
slam无人车重复定位精度+-0.5cm
[开源]迷你停车场车牌识别收费系统
智能车的最后一舞!!!它必定是绝响!!!
当科技照进现实 机器人带着机器狗乘空轨
目前刚刚完成了一款反光柱定位算法的研发工作,不过其尚处于雏形阶段,现阶段能够应用于重定位,或者充当辅助定位的手段。
2025年工创赛 工程训练大赛 智能+赛道 智能物流搬运机器人
智能镊子
【手把手教做轮足机器人】7_滚转姿态控制【原理讲解+代码开源】
反光柱定位算法
【开源】宇树Unitree Go2四足机器人/机器狗Isaac Sim/Isaac Lab ROS2仿真平台
【个人篇】入门系统性思维,需要攻克哪三大难关?
全网最低成本—具身智能机械臂+实操课程
slam无人车用图像特征做重定位