V
主页
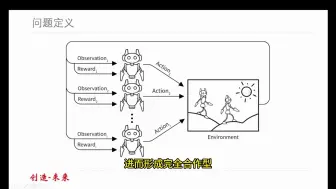
985博士带你玩转自动驾驶决策-carla等平台强化学习效果演示
发布人
北大和中大博士联合开发的实战项目,包括多智能体和单智能体强化学习,带大家快速入门代码实战,为项目开发打下基础。设立学习社区进行交流讨论,让同学们不再为跑项目和入门学习而发愁。
打开封面
下载高清视频
观看高清视频
视频下载器
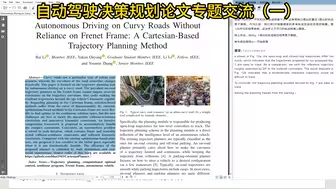
自动驾驶决策规划论文专题交流(二):Motion Planning for Autonomous Driving
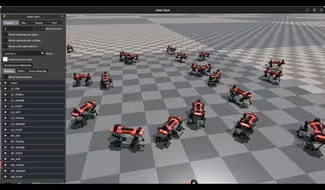
Isaaclab强化学习训练仿真:未来的丧尸电影还需要群演吗?
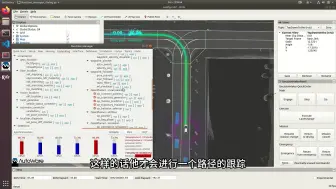
自动驾驶路径规划-控制决策入门学习
自动驾驶路径规划-控制决策入门学习-变道规划算法效果演示
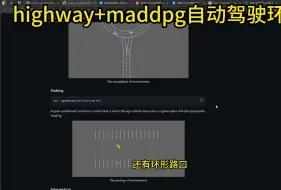
自动驾驶深度强化学习-HighwayEnv安装使用
自动驾驶多智能体深度强化学习-入门知识
人形机器人强化学习训练方法,为什么腿是直着的?humanoid gym
深度强化学习算法carla平台实战-PPO算法
14大模型全栈-强化学习07-DPO原理公式推导
自动驾驶决策规划论文专题交流(一)
自动驾驶决策规划论文交流(三)自动驾驶端到端论文
多智能体强化学习highway平台实战-maddpg算法
12大模型全栈-强化学习05-RLHF实战-端到端全流程解决方案-轩辕大模型强化学习完整流程介绍(数据+奖励模型+强化学习调参经验)
11.11直播回放-DWA算法基本思想分享
直播回放-自动驾驶决策规划基础Apollo-Lattice算法强化学习决策基础
自动驾驶路径规划-Lanelet教程
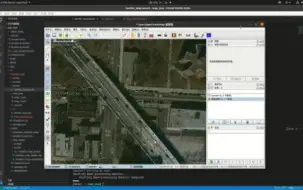
自动驾驶路径规划算法入门-Autoware.ai-carla联合仿真使用介绍
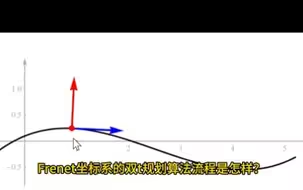
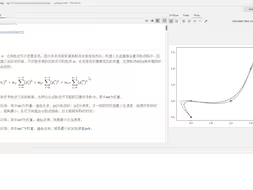
Frenet坐标系双t规划算法的代码原理讲解(二)
isaacgym强化学习示例
231230直播回放:自动驾驶qp二次优化实例讲解
B站首推!不愧是李宏毅老师讲的【强化学习】简直太详细!!!2024公认最通俗易懂的【强化学习教程】小白也能信手拈来(人工智能|机器学习|深度学习|强化学习)
11大模型全栈-强化学习04-RLHF实战-deepspeed-chat实战
自动驾驶规划控制算法工程更新简介
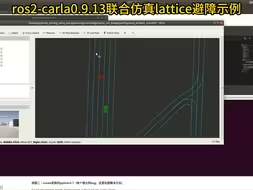
自动驾驶决策规划学习之ros2-carla0.9.13联合仿真lattice避障示例
吹爆!人工智能从入门到精通:Python基础+数学基础机器学习+深度学习+强化学习,涵盖所有基础知识及项目实战,AI新手必备!
自动驾驶路径规划-控制决策入门学习
13大模型全栈-强化学习06-DPO流程、代码以及损失函数介绍
自动驾驶学习决策-carla仿真轨迹预测演示
被PPO算法惊艳到了--自动驾驶强化学习决策规划工程-PPO算法实战
自动驾驶路径规划-控制决策入门学习
从零开始学习自动驾驶决策规划实战基础教程介绍
Lanelet教程-JOSM画图补充注意点
【DQN强化学习】超清晰!入门强化学习最好的书籍!多伦多爆火强化学习导论课程!—深度学习/神经网络/深度强化学习
自动驾驶决策规划学习之ros2-carla0.9.13联合仿真lattcie导航示例
不愧是王树森老师讲的【深度强化学习】,零基础入门到实战完整版教程!—DRL、深度强化学习、强化学习、王树森、计算机技术
自动驾驶carla ros仿真Apollo移植算法调试
自动驾驶路径规划ros-carla联合仿真使用
[强化学习]自动驾驶路径规划与控制-DQN/DDPG+pure pursuit路径跟踪实现
ROS-Carla泊车停车场联合仿真过程步骤讲解
发论文idea来了,强化学习+Transformer 29个创新点汇总! 再也不用担心发论文了