V
主页
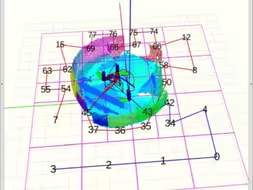
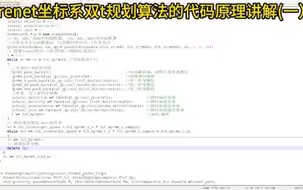
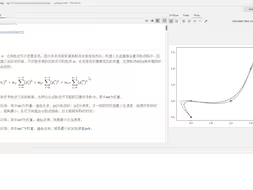
Frenet坐标系双t规划算法的代码原理讲解(二)
发布人
工程介绍可跳转查阅https://blog.csdn.net/weixin_39735688/article/details/131627490?spm=1001.2014.3001.5502
打开封面
下载高清视频
观看高清视频
视频下载器
【PX4+RACER】多机自主探索测试
自动驾驶决策规划论文专题交流(二):Motion Planning for Autonomous Driving
11.11直播回放-DWA算法改进点
深度强化学习Carla实战-SAC算法(二)--SAC-Carla训练过程
深度强化学习算法carla平台实战-PPO算法
自动驾驶决策规划论文交流(三)自动驾驶端到端论文
11.11直播回放-DWA算法基本思想分享
重磅推出ros2版本自动驾驶决策规划算法移植工程
被PPO算法惊艳到了--自动驾驶强化学习决策规划工程-PPO算法实战
自动驾驶路径规划ros-carla联合仿真使用
985博士带你玩转自动驾驶决策-carla等平台强化学习效果演示
自动驾驶规划控制算法工程更新简介
Frenet坐标系双t规划算法的代码原理讲解(一)
强化学习-自动驾驶路径规划控制决策-sac的高速公路和遮挡场景训练
自动驾驶路径规划入门-JOSM的使用
自动驾驶路径规划-控制决策入门学习
自动驾驶多智能体深度强化学习-入门知识
自动驾驶深度强化学习-HighwayEnv安装使用
231230直播回放:自动驾驶qp二次优化实例讲解
自动驾驶路径规划-Lanelet教程
直播回放-自动驾驶决策规划基础Apollo-Lattice算法强化学习决策基础
从零入门决策规划-手撕frenet规划算法(三)
OpenCDA框架效果演示
多智能体强化学习highway平台实战-maddpg算法
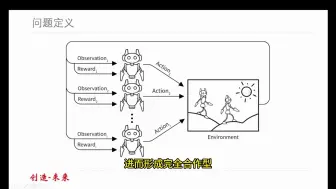
什么是强化学习?它的基本概念是什么?
自动驾驶决策规划论文专题交流(一)
轻松搞定强化学习--注意力机制的代码应用实战(下)
深度学习-强化学习必备实战经验-注意力机制的代码应用实战(上)
carla-autoware联合仿真-open planer避障教程三
10.28直播回放:入门简单搭建自动驾驶规划场景思路和经典的Frenet规划讲解
自动驾驶路径规划算法入门-autoware的实战使用
自动驾驶路径规划-控制决策入门学习-变道规划算法效果演示
自动驾驶carla ros仿真Apollo移植算法调试
自动驾驶算法学习常用的工具推荐
轻松上岸carla-ros联合仿真-carla环境配置与运行
自动驾驶深度强化学习-前言课
自动驾驶路径规划算法入门-Autoware.ai-carla联合仿真使用介绍
自动驾驶路径规划算法入门-autoware的实战使用
从零开始学习自动驾驶决策规划实战基础教程介绍
自动驾驶深度强化学习DRL-遮挡探头场景demo 训练全过程