V
主页
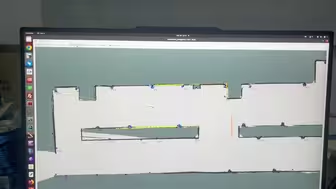
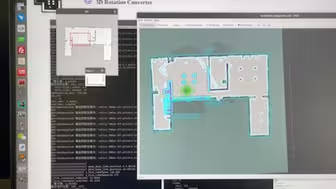
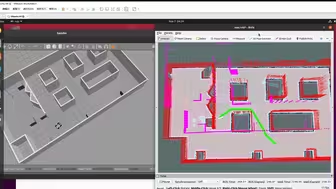
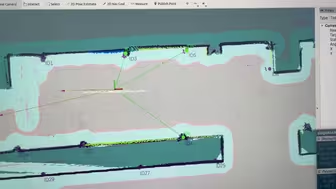
实车在真实环境跑一圈测试反光柱定位算法的稳定性
发布人
实车在真实环境跑一圈测试反光柱定位算法的稳定性 【反光柱定位算法-雷达强度数据包 - CSDN App】http://t.csdnimg.cn/HNrEm 反光柱定位算法 作者: 苏凯 系统环境: 系统:ubuntu20.04 ros1版本: noetic 雷达: sick TM581 说明: 此版本是针对长走廊环境设计的一款反光柱定位产品 文件: scanIntensities.txt : 强度值标定文件 allpoint.txt 部署在环境中的反光柱数据 calculate.txt 反光柱特征数据 调试: 启动仿真: /home/sukai/workspace/0/137/robot_noetic roslaunch turtlebot3_navigation turtlebot3_navigation.launch 数据包仿真调试: 读录制数据: roslaunch fanguangbantrilateration rosbag_trilateration_play.launch 雷达匹配情况: rosrun fanguangbantrilateration fanguangbantrilateration_matchCostmapWithScan_node 必须启动 反光柱定位算法: roslaunch fanguangbantrilateration trilateration.launch 日志打印: rosrun fanguangbantrilateration fanguangbantrilateration_read_time_log_node 启动动态参数服务器: rosrun rqt_reconfigure rqt_reconfigure 勾选: is_trilateration 开启反光板定位 参数: time_log_fig 控制日志数据内容 勾选: is_start_place_rotation_ 开启原地旋转不会更新定位数据 参数: rotate_in_place_variance_multiplier_ 在原地旋转时放大定位精度,从而减少定位的抖动带来的移动机器人反复调整位置. 勾选: is_use_scan_points_map_size 使用所有雷达点数量作为计算条件,如果使用所有雷达点数量作为计算条件只能适合在长走廊环境,需要满足所有点都能打到墙壁,不适合在宽阔且雷达打不到墙的环境中使用。不勾选 可以尝试在宽阔且雷达打不到墙的环境中使用,需要满足一部分雷达点能打到墙壁。 参数: matchingcostma_radius_ 雷达匹配情况->雷达点的与墙的搜索半径 参数: matchingcostma_threshold_ 雷达匹配情况->比例阀值,超过这个比例认为雷达与墙匹配的挺好 使用: 部署反光柱: 启动动态参数服务器: rosrun rqt_reconfigure rqt_reconfigure 勾选: is_trilateration 非勾选状态 rviz图形化中有 /clicked_point 话题,并指定回调函数,依次取地图反光板点位。 启动rosservice客户端服务: rosrun rqt_service_caller rqt_service_caller 选择: /trilateration_service 参数 request_type 输入: handleSavePosint 保存取到的地图反光板点位 参数 request_type 输入: handleCalculatePosintAllFeature
打开封面
下载高清视频
观看高清视频
视频下载器
喜报•我方电赛&robocup&江苏省机器人大赛无人机定位精度已达1cm!!!(多日不见,水个视频)
slam无人车重定位算法研发,目前估计国内我是第一个研发成功这种技术的。
反光板定位,多点定位
反光柱定位算法-重复定位精度测量(实测重复定位数据1cm以内)
反光柱定位算法(孔雀开屏)
三维定位的导航
反光柱定位算法,增加匹配显示颜色的更改功能。
目前刚刚完成了一款反光柱定位算法的研发工作,不过其尚处于雏形阶段,现阶段能够应用于重定位,或者充当辅助定位的手段。
现在的叉车都往窄通道高位仓储方向发展了,库容率大大增加
抵押车定位怎样才能拆干净
slam无人车重复定位精度+-0.5cm
反光柱拟合出圆心,并发布可视化坐标及 ID(有效距离处于 3.5 米范围内,超过此范围点云不再具有圆柱体特征)
韧性向AEB-L的进阶刃锋稳定性(这里指微观强度,不包括韧性)测试(刃角15dps)| 选取靠近刀柄的刃区,便于反握大力切黄铜棒
反光柱定位算法
【空间计算】VIOBOT2 室内 定位 导航【里程计】【实测】
slam导航定位精度达到+-1cm
什么??我们的机器人也会看路了!!!自主导航与避障全新体验~
反光柱定位算法及自动重定位算法,其计算得出的定位数据在任何时刻都完全不依赖前一次定位数据,成功突破了市面上同类算法需依赖前一次定位数据作为基准的局限。
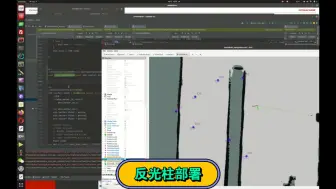
反光柱部署简单演示
slam无人车使用扩展卡尔曼滤波器融合imu 与未做融合imu 的效果对比
slam无人车用图像特征做重定位
slam无人车uwb 与amcl 做融合定位之卡尔曼滤波器
巴斯BUSSE热处理韧性向AEB-L和蜘蛛Spyderco热处理K390 削铝、黄铜棒测试一种刃锋稳定性(这里指微观强度,不包括韧性)
猎鹰亚瑟 慢镜头 看震动稳定性
optimization pose and rgb points
你这样努力再久也赚不到钱
无人机科普---重心、压力中心对稳定性的影响
瑞士BTKH9冲锋枪 具备独特可折叠设计 模块化系统提供优异稳定性
slam无人车UWB重定位算法实现
slam无人车通过上摄像头扫描二维码实现重定位
‘视’不可挡:OAK相机助力无人机智控飞行!
slam无人车二维码重定位
纯反光柱定位算法进阶版
瑞士威力铭408动态精度、动态刚性、动态稳定性
slam无人车静态自动重定位,动态重定自动位同时研发成功,国内首创。
25米,稳定性尚可
slam无人车通过uwb 实现重定位算法
slam无人车系统加密功能
7个反光柱的特征匹配完成耗时1ms
外面出售的虚拟定位揭秘!!!别再去购买了,换汤不换药的东西,看完视频你也懂!!!