V
主页
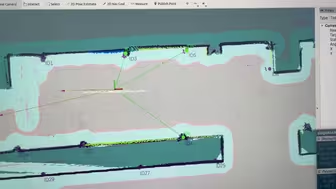
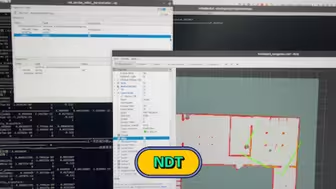
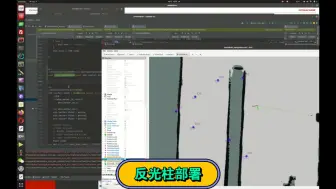
7个反光柱的特征匹配完成耗时1ms
发布人
7个反光柱的特征匹配完成耗时1ms qq群 742679602 【把ros消息转换成中文输出 - CSDN App】http://t.csdnimg.cn/e47Qb
打开封面
下载高清视频
观看高清视频
视频下载器
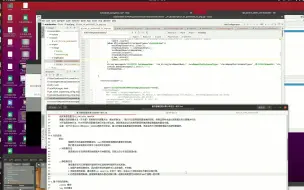
slam无人车基于雷达图像匹配地图重定位代码讲解课程已录制完毕,代码已开源。
slam无人车重定位算法研发,目前估计国内我是第一个研发成功这种技术的。
反光柱定位算法,增加匹配显示颜色的更改功能。
基于反光板回桩充电
印度工业体系被美国拿捏了
反光板定位,多点定位
目前刚刚完成了一款反光柱定位算法的研发工作,不过其尚处于雏形阶段,现阶段能够应用于重定位,或者充当辅助定位的手段。
不管在外面多猖狂,在cnc上班就老实了
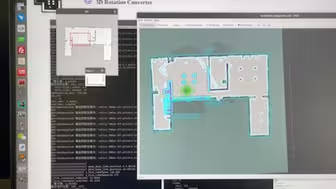
slam无人车通过点云匹配实现重定位功能
家里破点无所谓,创世神会出手
舵轮底盘运动模型已经建立完毕,并验证完成。
slam无人车自动回充之点云匹配充电桩
利用充电桩上的反光板引导移动机器人自动回充。
基于反光板引导对桩充电
slam无人车使用扩展卡尔曼滤波器融合imu 与未做融合imu 的效果对比
slam无人车全局路径规划,转角处路径做圆弧处理(4)
机械臂无序抓取(点云匹配)
还有这种好工作?只有“十大真神”才能干的 你懂的
slam无人车web端可视化充电桩点云匹配匹配
基于图片匹配算法做的slam小车重定位-第2集 opencv模板匹配演示
实车在真实环境跑一圈测试反光柱定位算法的稳定性
纯反光柱定位算法进阶版
反光柱定位算法-重复定位精度测量(实测重复定位数据1cm以内)
slam无人车UWB重定位算法实现
移动机器人里程计算法原理的深度解剖 - 移动机器人里程计算法学科介绍
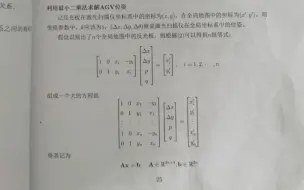
4舵轮正运动学解算
学机械让我明显感受到了信息闭塞的恐怖…..学机械之前如果早点知道这些该多好!(非分发不出,资料请移步评论置顶!)
基于图片匹配算法做的slam小车重定位-第3集 动态重定位
我勒个切车换位
slam 无人车自动回充之点云匹配
第一集 双轮差速模型求左右轮速度
反光柱定位算法(孔雀开屏)
机械臂视觉标定
七种机构原理
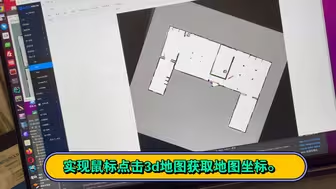
slam无人车,web端工具中实现rviz功能,鼠标点击3d地图获取地图坐标。(全网第一个在3d地图中实现这一功能)
基于图片匹配算法做的slam小车重定位-第6集 融合定位代码讲解
30岁再去做18岁的事情已经毫无意义
反光柱部署简单演示
“眼睛上粘胶水、野猪陷阱!”,中国丛林机器狗明显吓到越南网民了!
25工训校赛结束了看着还有很多进步空间