V
主页
京东 11.11 红包
特斯拉引爆在端到端技术大解密,分层解耦的端到端自动驾驶系统
发布人
自动驾驶的实现是通过输入摄像头采集的视频、GPS位置信息等,输出驾驶决策。与大部分复杂AI任务一样,自动驾驶的实现一般有两种技术路线:分治法和端到端。 目前,国内消费市场的智能驾驶系统采用的都是传统分治法,将自动驾驶任务切分为感知、预测、规划三个独立的模型,再进行系统集成来完成整个自动驾驶任务。 端到端模型则将感知、预测、规划三个模型融为一体,无需冗长的代码来制定规则,而是通过用海量数据去训练系统,让机器拥有自主学习、思考和分析的能力,能更好地处理复杂的驾驶任务。 您更看好哪种技术路线,评论区留下您的看法!
打开封面
下载高清视频
观看高清视频
视频下载器
新能源汽车电气系统架构讲解,全网最清晰讲解
自动驾驶之辅助驾驶,AEB(自动紧急刹车) 系统解密,AEB功能作用,危险目标筛选,安全距离模型
掌握AutoSAR第一步,了解AutoSAR分层概念与优点
详解自动驾驶多传感器标定,激光雷达标定,摄像头标定,毫米波雷达标定
零基础学AutoSAR:从发送CAN消息学起
体验美国无人出租车,真的能取代司机?
自动驾驶决策与控制算法——现代控制理论基础
细说氢燃料电池汽车
学习自动驾驶的正确姿势
什么是好的智能驾驶产品?如何设计出好的智能驾驶产品?
自动驾驶之车道保持,车道保持辅助系统LKA,干货,快收藏!
汽车架构未来趋势,会是autoSAR 与AI结合吗?
入门好课,摄像头与计算机视觉技术
充电控制之快充控制,BMS必学内容,学新能源汽车的一定要看
你了解什么是VCU吗?你了解什么是VCU开发工程师吗?你知道VCU开发的前景吗?
储能电池BMS系统与动力电池BMS系统的区别
深入了解CAN 总线,动画演示,全网独一份
GPS与高精度定位,自动驾驶汽车如何实现精准定位
电池储能系统(BESS)入门
2021自动驾驶技术现状盘点--应用、难点和趋势
自适应 AUTOSAR 如何实现自动驾驶,AP AUTOSAR的标准详解
VCU进阶学习 VCU控制器 存储协议栈
清华博士在线讲解车辆二自由度模型建立和仿真作业难点以及设计PID输出反馈控制器如何进行PID参数优化
车载嵌入式系统信息安全
VCU软件架构,基于Simulink模型开发实例
自动驾驶无保护左转对比分析
为什么无人车要用激光雷达,激光雷达的工作原理,它是如何处理数据的?
电动汽车的最大骗局,要曝光了?
HE-Drive 是第一个以人为中心的端到端自动驾驶系统,能够生成时间上一致且舒适的轨迹。
重新定义自动驾驶的动态视觉?谷歌提出几何优先的动态场景方法MonST3R
电池蓄能系统(BESS),2023新风口,锂离子电池储能系统,你知道多少?
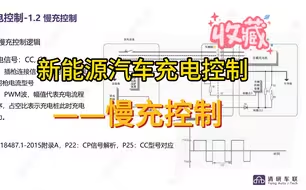
新能源汽车充电系统之慢充控制,BMS必学内容,学新能源汽车的一定要看
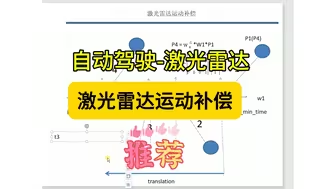
详解自动驾驶多传感器标定,激光雷达运动补偿,激光雷达与相机融合,点云数据,时间同步与空间同步
10.功能安全开发-SSR和软件架构
砍掉激光雷达行不行?端到端全面上车!小鹏P7+AI鹰眼智驾抢先测试!
纯视觉智驾才是未来?多家高管站队特斯拉FSD,华为ADS真的错了?
百问百答:关于汽车功能安全,你想知道的都在这里
3.功能安全管理与开发流程
刀片电池突破的背后是什么?
2.功能安全标准