V
主页
自动驾驶决策规划
发布人
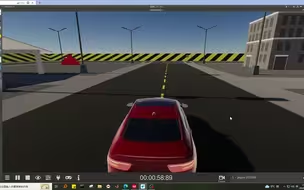
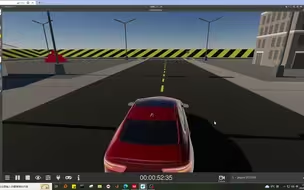
基于Carsim + simulink + prescan仿真平台的自动驾驶汽车决策规划算法开发。使用动态规划+二次规划,实现对车辆对静态障碍物的决策与规划,利用自己simulink开发的控制算法对规划路径进行跟踪,完成自动驾驶汽车对障碍物的避障。
打开封面
下载高清视频
观看高清视频
视频下载器
特斯拉自动驾驶FSD入华临近,深度梳理4家受益核心上市公司
路径规划+速度规划
基于MPC的自动驾驶控制算法
自动驾驶LQR横向控制
自动驾驶横纵向控制,纵向PID+横向Stanely
基于LQR的自动驾驶控制算法
自动驾驶纵向速度控制
IROS 2024 | NAVINACT:结合导航和模仿学习进行增强强化学习
这才是科研人该学的!一口气学完自动驾驶八大算法-环境感知、目标检测、语义分割、强化学习、决策与控制算法!原理到实战,太通俗易懂了!机器学习|深度学习|计算机视觉
自动驾驶双PID纵向控制
【自动驾驶技术】花18000大价钱买的无人驾驶课程,从入门到提升的自动驾驶算法——感知实战、视觉定位、预测系统、路径规划、控制理论、强化学习
自动驾驶横纵向综合控制
计算机校招笔试必考题型——动态规划 | 动画解读
算法基础 | 分治法、贪心法、动态规划法、回溯法、分支限界。例题包括最近点对、背包问题、带时限的作业排序问题、最小生成树、多段图问题、矩阵连乘、N皇后、15谜等
【毕设-大作业01】-YOLOv10+车道线检测+ByteTrack跟踪:ADAS自动驾驶辅助系统(碰撞警告、车道偏离预警、车道保持辅助
看完特斯拉AI团队公布的最新自动驾驶发展蓝图,真的太震撼了!必须跟大家分享一下
NVIDIA 自动驾驶实验室|利用生成式 AI 增强自动驾驶仿真
ROS机器人自动驾驶,自主导航巡检车可作为高校车辆工程、智慧交通、自动化等多专业的实践教学工具
ROS2自动驾驶|边做边学(一)里程计与控制
ECCV'24 | 无图定位新突破!从低精地图到使用全景-BEV联合检索网络进行跨视图图像地理定位。
垒积木(贪心算法 动态规划)
EM Planner is all u need?
22个游戏带你上手算法 - 12 垒积木(贪心算法 动态规划)
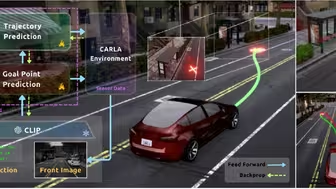
轨迹预测会不会被端到端干掉?Path-based的轨迹预测还有未来么?
极越ASD阿波罗高阶智驾生在中国,长在中国,更懂中国路!
零基础python
点亮人生的第一个流水灯
卖了model3换小鹏MONA M03,消费升级/降级/治疗精神内耗?
终于搞好了蓝牙通信
端到端自动驾驶与传统规控的爱恨情仇?
大疆智驾,把端到端拉下神坛
多障碍物联合预测!理论全搞定~
关注智驾耐久问题
【比赛讲解】ABC367 A~F 讲解
ECCV 2024 Oral PDD:无限3D场景生成新工作!代码重磅开源!
吴佩对话余凯 | 十年,手动驾驶将成为新闻
全球最大单笔智能驾驶重卡交付 | 中通快递400台
特斯拉五年内至少涨五倍,但99%的人会被甩下车
“害怕是源于不了解”- 中通快递自动驾驶司机说
体验完华为ADS智驾3.0后,“我怂了”