V
主页
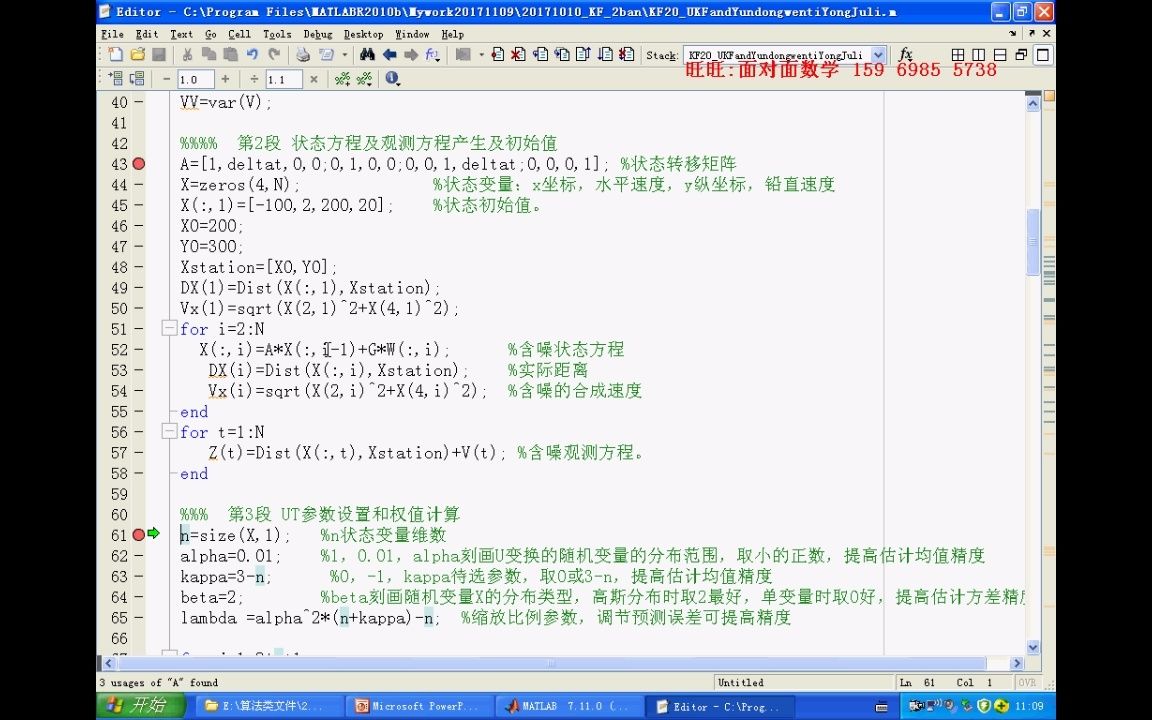
无迹卡尔曼滤波UKF算法实现基于观测距离的二维运动目标跟踪问题
发布人
https://ke.qq.com/course/382321 无迹卡尔曼滤波UKF算法实现基于观测距离的二维运动目标跟踪问题
打开封面
下载高清视频
观看高清视频
视频下载器
扩展卡尔曼滤波利用观测距离跟踪目标和MATLAB程序详解视频讲解论文用图4个及数值指标进行误差分析
方位观测利用扩展卡尔曼滤波实时跟踪目标和MATLAB程序详解视频课程讲解所得结果图像4个与误差分析与强调程序重点
粒子滤PF算法实现视觉运动目标的跟踪问题及程序结果
多目标遗传算法求解资源配置问题与MATLAB程序视频讲解论文目标函数改正问题及程序反复调试操作
哪个瞬间你突然觉得读书真有用??
支持向量机SVM算法实现对柴油机故障诊断的3种方案分类预测及其准确率
多目标遗传算法复现论文,视频课程学习目标,火电厂发电功率与环保废气排放的资源优化配置数学模型解读分析
终于知道为什么有答题卡了🤣
遗传算法优化BP神经网络算法分析自己实际数据与程序通用
强化学习环境如何创建之二,单步函数dsStepFnc的功能与实际例程及如何设置下一个状态和得到下一个观测值,是求解自己问题的最关键地方
"你有没有发现:只要你一整天都很认真的学,少用手机,完成该完成的任务,运动半小时出点汗,内心就会感到平静和快乐,也不会再胡思乱想,患得患失,焦虑不已了"
无目标函数表达式优化问题视频课程的内容总结与视频算法及程序回顾,BP神经网络遗传算法,遗传算法优化BP神经网络
多尺度排列熵算法和MATLAB程序详解视频计算与分析9个典型信号的MPE
遗传算法优化支持向量机实现数据特征识别分类准确率百分之百意大利葡萄酒等级分类问题
强化学习策略迭代算法求解两地出租车优化调度的结果解读
最小二乘法多元多项式非线性回归及其应用实例
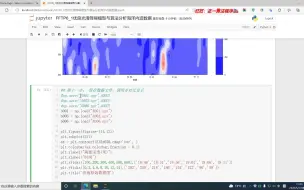
python程序傅里叶变换FFT及其频谱图分析
学霸圈公认的高效学习法
强化学习如何创建自己问题的MATLAB环境关键问题之一,重置函数dsResetFnc的功能及其两种类型与重置函数设置原则,对重置函数内容进行深入分析和全面总结
创建强化学习环境有哪些问题要自己完成
傅里叶变换包含哪些内容以及可以解决哪些问题,优良能量降噪模型与算法,优良保速降噪模型与算法
Python二维矩阵数据作傅里叶变换实现优良降噪效果图及论文用图与指标
强化学习智能体Agent模块的功能和如何设置操作以及可改之处与可改建议
强化学习设计器包含哪些内容,可以解决哪些问题,有DQN,PPO,TRPO,DDPG,TD3,SAC等6个智能体
【Adobe全家桶2024】9月最新版 免费下载(附安装包)!PR AE PS AI等!一键不限速!支持Win+Mac!永久使用!视频剪辑/影视后期/插件预设
多目标粒子群算法的非劣解及其目标值空间分布显示
Unity幻想风场景小练习
【未明子】激进左人一边享受着基层治安利益,一边脑内疯狂幻想
针灸必备歌赋合集 多听多背!! 自然就会 (标幽赋 通玄指要赋 百症赋 肘后歌 金针赋 马丹阳天星十二穴杂病歌)
深度强化学习AC算法执行股票交易策略及利润结果分析
傅里叶变换及其逆变换实现5个不同的带通滤波降噪图像分析
正一算法程序视频课程的程序提供说明与课程亮点特点介绍。全部免费提供下载。 程序足够用:(1)程序有详解;(2)详解可改之处和可改建议;(3)只需代入自己数据
Simulink模型运行初始起点与运行逻辑关系及如何改成自己问题的可改之处建议
强化学习值迭代算法求解迷宫出逃路径的动作表示及最优行走路径画图
BP神经网络实现回归预测问题的程序及图形显示
经验模态分解EMD算法分解得到IMF与原始信号分量的联系与对比有图有指标
深度强化学习DQN算法实现手推车及直立竖杆系统平衡的控制策略及程序可改建议
交叉验证法CV优化支持向量机SVM的参数c和g论文用图及数值指标
易混淆概念数学题
强化学习设计器中MATLAB环境和Simulink环境及其特点分析,六个常用智能体DQN,PPO,DDPG,SAC,TD3,TRPO使用的状态和动作总结说明