V
主页
强化学习设计器包含哪些内容,可以解决哪些问题,有DQN,PPO,TRPO,DDPG,TD3,SAC等6个智能体
发布人
《强化学习设计器(RLD)使用与MATLAB程序详解视频》共9章39节视频,总学时322-6分钟,合5.3小时。 【主要内容包括】:视频课程内容介绍及慎拍不拍说明与参考文献,创建环境和创建智能体及超参数设置,训练智能体操作及训练参数设置,仿真测试智能体及测试参数设置,数据检查器操作及保存训练进程和仿真结果图像,车杆平衡系统控制问题利用Simulink环境和DQN智能体训练仿真,双积分系统控制问题利用MATLAB环境和PPO智能体训练仿真,四足机器人行走控制问题利用Simulink环境和DDPG智能体训练仿真,四足机器人行走控制问题利用Simulink环境和TD3智能体训练仿真。 全部免费提供MATLAB代码程序和PPT课件。免费提供辅导答疑。 第一章 视频课程内容介绍及慎拍不拍说明与参考文献(25-6分钟) 1、RLD1_1视频讲些什么内容及能干什么说明(11-6分钟,网络上免费“试看”) 3、RLD1_3慎拍不拍建议与学习基础要求及参考文献(7分钟,网络上免费“试看”) 第二章 创建环境和创建智能体及超参数设置(62分钟) 5、RLD2-1学习强化学习设计器的目的与作用(7分钟) 6、RLD2-2设计器的基本框架及功能讲解(4分钟,网络上免费“试看”) 7、RLD2-3新创建环境与导入自己问题的环境(9钟,有程序) 8、RLD2-4新创建智能体及其超参数基本设置(9分钟,有程序) 9、RLD2-5智能体参数及双Q学习法与目标更新频率(8分钟) 10、RLD2-6Actor和Critic及其参数设置(11分钟) 11、RLD2-7ε-贪婪策略及其衰减率设置(7分钟) 12、RLD2-8OU随机噪声及其衰减率设置(7分钟) 第三章 训练智能体操作及训练参数设置(34分钟) 14、RLD3-1深度强化学习全部参数解读及训练智能体操作(12分钟) 15、RLD3-2训练参数设置及训练进程解读与分析(12分钟) 16、RLD3-3训练进程解读及预训练智能体保存(10分钟) 第四章 仿真测试智能体及测试参数设置(20分钟) 17、RLD4-1保存当前会话结果及仿真测试经验介绍(10分钟) 18、RLD4-2仿真参数设置及仿真测试结果解读分析(10分钟) 第五章 数据检查器操作及保存训练进程和仿真结果图像(39分钟) 19、RLD5-1训练进程图像保存及训练程序生成(12分钟,有程序) 20、RLD5-2仿真测试图像保存及测试程序生成(12分钟,有程序) 21、RLD5-3数据检查器简介及绘制回合6个子图(7分钟) 22、RLD5-4仿真测试图像和数据保存及比较操作(8分钟) 第六章 车杆平衡系统控制问题利用Simulink环境和DQN智能体训练仿真(33分钟) 23、RLD6-1目标要求及两类环境特点与六个智能体特点(6分钟,,网络上免费“试看”) 24、RLD6-2车杆平衡控制问题简介及设计器操作安排思路(6分钟,有程序) 25、RLD6-3新创建Simulink环境与DQN智能体及训练出错(7分钟,有程序) 26、RLD6-4纠错过程及2处改正到程序正常运行(5分钟,有程序) 27、RLD6-5训练失败到正常及3个结果保存(9分钟,有程序) 第七章 双积分系统控制问题利用MATLAB环境和PPO智能体训练仿真(31分钟) 28、RLD7-1双积分系统控制问题简介及设计器操作安排思路(7分钟,有程序) 29、RLD7-2新创建MATLAB环境与PPO智能体及参数设置(9分钟,有程序) 30、RLD7-3训练参数设置及停止条件(7分钟,有程序,网络上免费“试看”) 31、RLD7-4训练与仿真第2和第3方案及过程分析(8分钟,有程序) 第八章 四足机器人行走控制问题利用Simulink环境和DDPG智能体训练仿真(31分钟) 32、RLD8-1四足机器人快速行走控制问题简介及设计器操作思路(10分钟,有程序) 33、RLD8-2导入Simulink环境与导入DDPG智能体及参数设置(11分钟,有程序) 34、RLD8-3训练与仿真DDPG智能体过程分析及结果保存(10分钟,有程序) 第九章 四足机器人行走控制问题利用Simulink环境和TD3智能体训练仿真(47分钟) 35、RLD9-1TD3算法操作安排思路及运行自编程序再导入环境(8分钟,有程序) 36、RLD9-2创建TD3智能体及超参数设置解读与保存(6分钟,有程序,网络上免费“试看”) 37、RLD9-3训练TD3智能体和过程解读分析及机器人表现(11分钟,有程序) 38、RLD9-4训练与仿真TD3智能体过程分析及3个结果保存(10分钟,有程序) 39、RLD9-5训练与仿真3次继续或恢复等综合操作解读(12分钟,有程序)
打开封面
下载高清视频
观看高清视频
视频下载器
强化学习设计器中MATLAB环境和Simulink环境及其特点分析,六个常用智能体DQN,PPO,DDPG,SAC,TD3,TRPO使用的状态和动作总结说明
强化学习智能体Agent模块的功能和如何设置操作以及可改之处与可改建议
【比刷剧还爽!】从入门到精通CNN、RNN、GAN、GNN、DQN、Transformer、LSTM等八大深度学习神经网络一口气学完!
DDPG深度强化学习算法处理连续状态及连续动作问题
强烈推荐!国防科技大学OpenCV图像处理全套教程!终于有人将opencv讲透了!存下吧,比啃书好多了!机器视觉/人脸检测/计算机视觉/人工智能
【深度学习零基础篇】从入门到精通一口气学完CNN、RNN、GAN、GNN、DQN、Transformer、LSTM等八大深度学习神经网络!人工智能/深度学习
Simulink模型运行初始起点与运行逻辑关系及如何改成自己问题的可改之处建议
变分模态分解心电图ECG信号加噪及FFT结果显示与分析,原创优良降噪整形算法与MATLAB程序视频,全部免费提供MATLAB程序,免费提供PPT课件,免费答疑
麻省理工【算法导论】原著大佬带你一起啃书!全23讲!99%的程序员都会学!(人工智能、深度学习、机器学习、神经网络、pytorch、AI)
无迹卡尔曼滤波UKF算法实现基于观测距离的二维运动目标实时跟踪问题
无迹卡尔曼滤波UKF实现距离观测的平面运动目标实时跟踪结果的误差分析与论文图像显示
COMSOL深度神经网络学习-模型预测-代理模型训练
【0零基础MATLAB入门】台湾大学郭彦甫教授!简单易懂,看完就能用!-深度学习/机器学习/算法
如何启动强化学习设计器以及适合哪些人学习使用它,使用强化学习设计器有哪些好处
强化学习环境如何创建之二,单步函数dsStepFnc的功能与实际例程及如何设置下一个状态和得到下一个观测值,是求解自己问题的最关键地方
创建强化学习Simulink环境有哪些内容和知识点,下一步应该继续怎么做
还好我有【MATLAB论文复现】教程,花费12800的买MATLAB论文如何完整复现?看这个比刷剧还爽一百倍
Simulink实现恒功率负载的三种方法
这才是科研人该学的!一口气学完自动驾驶八大算法-环境感知、目标检测、语义分割、强化学习、决策与控制算法!原理到实战,太通俗易懂了!机器学习|深度学习|计算机视觉
强推!这才是科研人必备的【MATLAB】教程!通俗易懂,看完我直接把书扔了!人工智能/神经网络
PyTorch深度学习实践!不愧是公认讲的最好的【pytorch实践教程】12小时带你从入门到实践
扩展卡尔曼滤波EKF与无迹卡尔曼滤波UKF方法分析数学模型问题
扩展卡尔曼滤波利用观测距离跟踪目标和MATLAB程序详解视频讲解论文用图4个及数值指标进行误差分析
研究生宝藏教程【MATLAB论文复现】,原文解读+代码复现+手推公式,全都是干货!!!(图像处理/优化算法/蚁群算法/马尔可夫链)
多目标遗传算法复现论文,视频课程学习目标,火电厂发电功率与环保废气排放的资源优化配置数学模型解读分析
微电网中DC/DC与DC/AC变换器连接的simulink仿真(逆变器稳定母线电压,含调试方法、思路)
9月14日-MATLAB公开课
方位观测利用扩展卡尔曼滤波实时跟踪目标和MATLAB程序详解视频课程讲解所得结果图像4个与误差分析与强调程序重点
整整200集,比刷剧还爽!深度学习必看圣经!李沐大神《动手学深度学习》最新版全套视频教程分享(人工智能/深度学习/计算机视觉)
遗传算法视频课程学习哪些内容对程序重要结果演示说明
冒死上传!花12800买来的【MATLAB全套】教程,花费156个小时整理的MATLAB基础版全套视频教程,(人工智能,机器学习)
Python程序傅里叶变换FFT提取4类典型信号的频率与幅值及初始相位的等特征及程序详细讲解
缝合CNN+LSTM+KAN模型,KAN是提升模型性能的重点?一期时间序列预测任务实战告诉你答案! -机器学习/深度学习/Pytorch
强化学习策略迭代算法求解两地出租车优化调度的结果解读
永磁电机矢量控制系列-面对上千页的芯片手册-如何快速实验入门(2)——几种常见PWM与定时器配置
2024最新 Android Studio 安装配置步骤
【matlab安装包】matlab2024B下载安装教程(附matlab安装包下载链接)(9月最新版),matlab激活,matlab2024最新!!!!!!
一口气!【MATLAB】学完神经网络、遗传算法、蚁群算法、模拟退火算法和粒子群优化算法!存下吧,真的比啃书好多了!人工智能/机器学习/深度学习/支持向量机
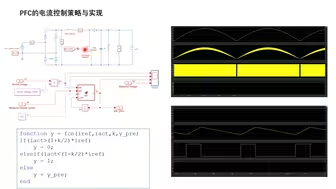
PFC电流控制-MATLAB SIMULINK-马上就闭环啦
90分钟串讲Attention-Transformer-BERT-GPT