V
主页
京东 11.11 红包
二自由度机械臂模型预测控制,非线性控制Simulink仿真
发布人
二自由度机械臂模型预测控制,非线性控制Simulink仿真 通过使用反馈线性化控制对机械臂的非线性动态模型进行线性化。 一旦获得线性模型,就可以采用模型预测控制方法。 关键词——二自由度机器人臂;动态模型;非线性控制;模型预测控制 参考文献:Model predictive control of a two-link robot arm
打开封面
下载高清视频
观看高清视频
视频下载器
【文章复现】面向轨迹跟踪与避障的无人水面舰艇实时非线性模型预测控制NMPC
三相PWM整流器有限集模型预测控制FCS-MPC仿真
基于Simulink的BP神经网络自适应pid控制仿真
基于模型预测MPC的平行泊车路径跟踪控制Simulink仿真
SPMSM永磁同步电机有限集单矢量模型预测直接转矩控制MPDTC
PID控制、LQR控制、FLC控制、SMC控制、Backstepping控制、MRAC(模型参考自适应控制)四轴飞行器matlab代码
Simulink 自动生成DSP 28335代码有实例教学视频(视频及学习资料)
【复现】基于神经网络的非线性系统一致性模型预测控制(NN-MPC)
【多智能体编队】多智能体点对点转换的分布式模型预测DMPC控制(文档和程序)
基于ADRC自抗扰控制的无模型预测电流控制永磁同步电机仿真
【分布式预测】控制算法基本阶跃响应模型的动态矩阵控制matlab算法
Simulink永磁同步直线电机滑模控制器,PMLSM矢量控制SVPWM调制仿真模型
基于新型趋近律和扰动观测器滑模控制和模型预测电流控制的永磁同步电机研究
永磁同步电机模型预测转矩最优占空比控制
永磁同步电机传统模型预测转矩控制
【IEEE复现】基于超局部扩展状态观测器的永磁同步电机无模型预测电流控制
有限控制集模型预测两电平三相并网逆变器
基于模型预测MPC控制的无人驾驶车辆轨迹跟踪车辆规划问题研究
无人机(UAV)模型预测控制(MPC)跟踪圆形轨迹
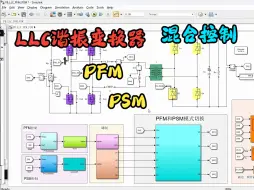
全桥LLC谐振变换器变频PFM与移相PSM混合控制仿真
超螺旋滑模控制(超扭滑模控制)与传统滑模性能对比
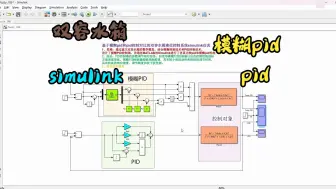
基于模糊pid和pid控制对比的双容水箱液位控制系统simulink仿真
永磁同步电机传统模型预测电流控制MPCC
【多智能体编队】基于分布式模型预测DMPC控制的多固定翼无人机的共识控制(文档和程序)
永磁同步电机无差拍模型预测转矩控制svpwm控制
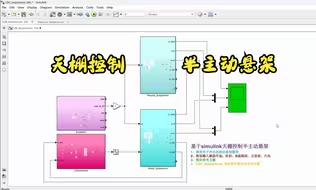
基于simulink天棚控制半主动悬架
基于PID控制的ABS汽车制动防抱死模型(附带详细建模和仿真分析资料)
中性点不接地系统或中性点经消弧线圈接地系统的小电流接地故障仿真
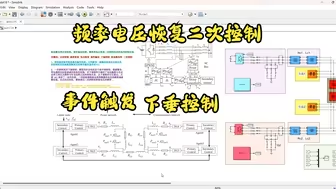
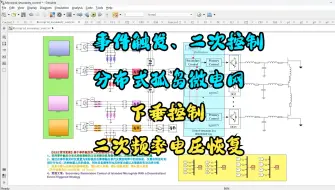
【SCI顶刊复现】孤岛微电网分层控制、事件触发机制、频率和电压恢复二次控制的多机协同控制仿真
【IEEE顶刊复现】基于事件触发和二次控制的分布式孤岛微电网二次频率电压恢复控制仿真
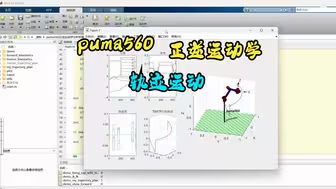
puma560正逆运动学分析机械臂固定轨迹运动
基于自适应神经网络PD控制机械臂轨迹跟踪matlab代码
基于Plecs的四开关buck-boost变换器闭环仿真模型
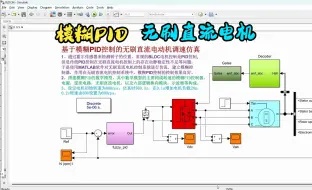
基于模糊PID控制的无刷直流电动机调速仿真
基于模型预测控制车辆轨迹跟踪
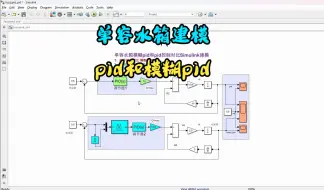
单容水箱模糊pid和pid控制对比Simulink建模
【分享】20k _2000W超声波发生器原理图和PCB以及BOM
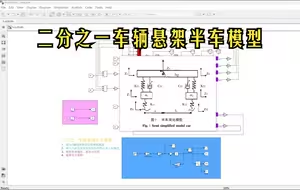
二分之一车辆悬架半车模型
【复现】基于自适应偏置RBF神经网络的机械臂控制MATLAB代码
一阶倒立摆PID和模糊PID控制系统设计Simulink仿真【包括详细报告】