V
主页
京东 11.11 红包
不完全对称的Delta机器人多目标优化设计(刚度、工作空间、灵巧度指标最大化)
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
通过MATLAB-workbench联合仿真,实现两连杆机械臂结构参数的单目标优化设计
双滑块并联机构多目标优化设计(刚度最大化、占地空间最小化)
机器人多原则优化设计
采用MATLAB进行平面五连杆机构的图形化显示,灵巧度的指标分布与评价,可达工作空间与规则工作空间的绘制
机器人运动分析-速度(雅克比矩阵)与加速度方程
机器人刚度建模的解析法-虚拟弹簧或者虚拟关节法
CAD方法找寻delta机器人的工作空间
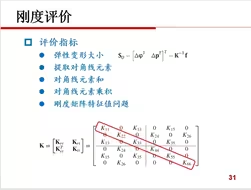
刚度矩阵特性分析与刚度评价
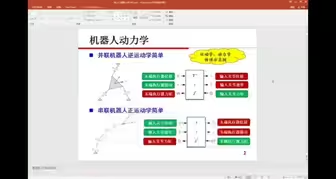
机器人动力学建模的一般基础
机器人基本控制算法
机械臂前馈控制(torque Feedforward control)
机器人MATLAB-Adams联合仿真
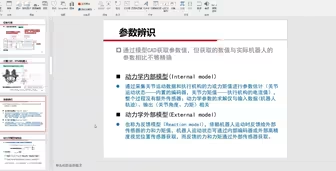
动力学方程参数辨识
终于找到三端通用免费分享 优化波段主图SUPERTREND高低划线压力支撑指标公式代码分享在简介
[VEX][搬运]澳洲强队18422B MidSeason Reveal(doge
公主被改造成为液体机器人#改造#机械飞升
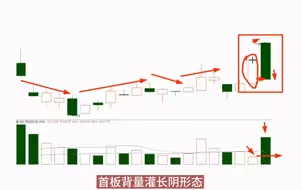
股票涨停后,一旦出现“涨停倍量阴”,千万不要错过了,后市还有空间!满足4个条件后,撸起袖子加油干!
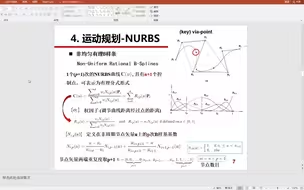
非均匀有理样条曲线(NURBS)进行机械臂的多目标轨迹规划
成功概率100%的战法:MACD+BBI指标,精准捕捉买卖点,拒绝滞后,练到极致就是绝活!跟庄吃肉爽歪歪
iphone 套壳掌机?
Python自动指标寻优 生成通达信公式
A股神奇指标:CCI指标抓主升浪,10万半年做到300万,胜率高达93%!
全新最佳盈利买卖指标 TradingView
AMA考夫曼自适应变动变色均线 波段王者均线建议分钟级别 主图指标公式代码分享在简介
史上最神秘的指标:DPO指标,抓主升浪成功率竟高达90%!超过99%的人都不知道
【MACD指标 技术分析】这是你唯一必看的MACD终极完整教学课程(15分钟立马上精通)|带你了解以及掌握1%职业交易员使用的MACD交易策略
刚度,强度,硬度之间到底有什么不同?
史上排名第一的短线指标:BOLL+KDJ,1天获利8%成功率100%,堪称极品!用一次准一次!
KDJ指标八大分析原则,短线操作股票的关键所在,建议收藏研究
停止使用旧的 HEIKEN ASHI指标,这个新的买/卖版本可以印钱!
史上排名第一的指标,全能DMI指标,准确率高达98%,买入即主升浪,收藏学习!
【均线指标】⚡打天下之术!
[98% 高精度] RSI-COBRA 交易课程:终极高级策略揭秘
我为啥不喜欢用指标
交易中你只需要一个矩形和一条线(完整交易策略)
还有高手:诛仙世界(帧率,优化?)
Supertrend全网无二的秘密用法(2)
走势结构的自同构性,走势级别的自主性(缠论/量价分析/主力行为/技术指标等完全融汇的交易技术体系)
流动性概念解释:我掌握市场的关键!
Supertrend全网无二的秘密用法(1)