V
主页
京东 11.11 红包
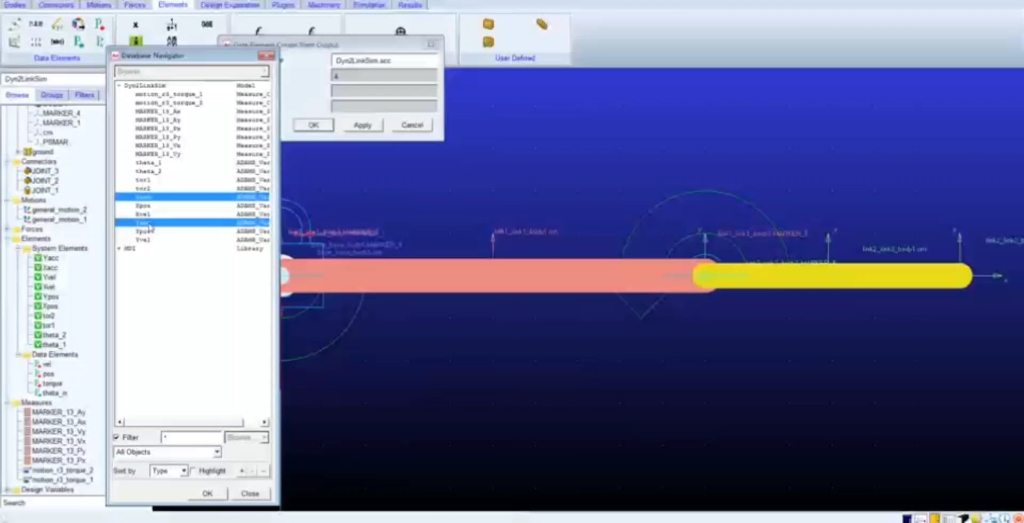
机器人MATLAB-Adams联合仿真
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
机器人SolidWorks-simscape联合仿真
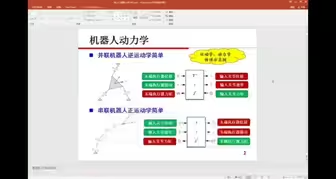
机器人动力学建模的一般基础
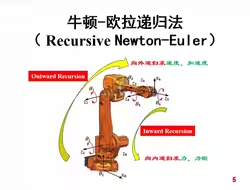
机械臂动力学建模的牛顿欧拉递归法
MATLAB-ANSYS/workbench联合仿真,一个简单案例,二连杆机械臂
并联机器人仿真、分析与设计入门,MATLAB在机器人仿真设计中的应用,以平面五连杆机构为例的位置求解,图形化显示以及其它方面的内容会陆续上传
MATLAB的gui设计与机器人配置显示
机械臂前馈控制(torque Feedforward control)
机器人运动分析-速度(雅克比矩阵)与加速度方程
并联机器人动力学建模虚功原理方法
双滑块并联机构多目标优化设计(刚度最大化、占地空间最小化)
采用第二类拉格朗日方法进行平面二连杆机械臂的动力学建模,MATLAB仿真
CAD方法找寻delta机器人的工作空间
MATLAB实现3rpr平面并联机构的几何逆解
delta机器人的刚度建模解析方法,采用虚拟弹簧方法
机器人多原则优化设计
机器人设计与仿真课程,内容涵盖参数化建模、设计、分析、优化、控制、运动规划,采用理论与案例实操讲授方式,助力提升科研论文插图、商业软件使用与联合仿真技能
平面五连杆机构的速度加速度方程,使用MATLAB实现动态轨迹追踪,输出末端执行器和关节运动参数
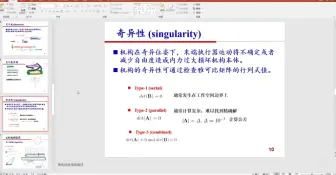
并联机器人奇异特性分析,奇异位姿与奇异点的识别
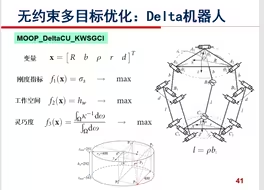
不完全对称的Delta机器人多目标优化设计(刚度、工作空间、灵巧度指标最大化)
3T1R并联机器人迭代学习控制(iterative learning control)
复杂非线性约束的多目标优化设计-以三自由度球面并联机构为例
采用七次多项式、冲击(jerk)最小为目标进行机械臂的轨迹规划
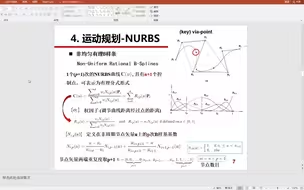
非均匀有理样条曲线(NURBS)进行机械臂的多目标轨迹规划
【冰月爱恋】穿回高中时代,校霸把我堵到墙角,亲老子一口,老子任你摆布,我踮起脚尖亲了上去
吹吹海风
31. Change of Basis; Image Compression [0h43aV4aH7I]
10. The Four Fundamental Subspaces [nHlE7EgJFds]
Dynamics and Control 2-4 Ch 2 Exercise 10 [gCOt0i8rcsc]
1. The Geometry of Linear Equations [J7DzL2_Na80]
陛下 且看我为你舞一曲
59金锺奖Energy中场表演
Dynamics and Control 7-1 Modal Analysis Context [mQ3Jwbnmj1Q]
Dynamics and Control 8-1 Energy and Lagrange's Equation [U5rwsmwNtYA]
32. Quiz 3 Review [HgC1l_6ySkc]
Dynamics and Control 1-2 Complex Notation [5KoIIoSxdQk]
🌚一个标准的身体和罕见的身体都是医学生无法拒绝的
Dynamics and Control 7-2 Modal Analysis 2DOF Example [nlXC4u6Jjxs]
14. Orthogonal Vectors and Subspaces [YzZUIYRCE38]
11. Matrix Spaces; Rank 1; Small World Graphs [2IdtqGM6KWU]
34. Final Course Review [RWvi4Vx4CDc]