V
主页
京东 11.11 红包
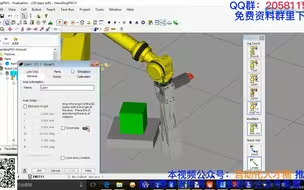
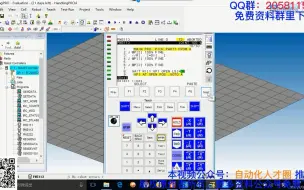
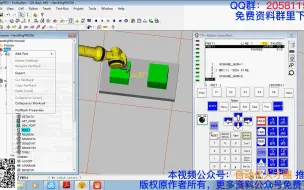
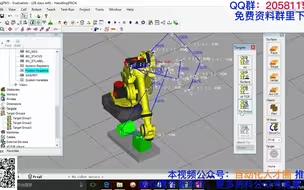
13 发那科机器人手动输入法标定工具坐标系
发布人
13 发那科机器人手动输入法标定工具坐标系
打开封面
下载高清视频
观看高清视频
视频下载器
11 发那科机器人三点法标定工具坐标系定点的操作过程
41 发那科机器人在程序中使用注释
67 发那科机器人使用Jog面板快速切换坐标系
57 发那科机器人修改机器人的负重配置
44 发那科机器人在程序中复制程序代码
发那科机器人自动打磨去毛刺
76 发那科机器人用位置编辑器编辑点坐标
53 发那科机器人恢复机器人程序
46 发那科机器人在程序中使用查找指令
08 发那科机器人PR寄存器讲解
14 发那科机器人工具坐标系的手动切换和自动切换
19 发那科机器人Iog坐标系的使用和标定方法
07 发那科机器人通用io的分配
55 发那科机器人修改机器人系统变量的数值
58 发那科机器人的系统配置
17 发那科机器人用户坐标系的使用和直接输入法标定a
71 发那科机器人用标签在对象上加注释
62 发那科机器人与三菱q plc cclink设置
18 发那科机器人用户坐标系的使用 切换用户坐标系
30 发那科机器人模拟量io的使用
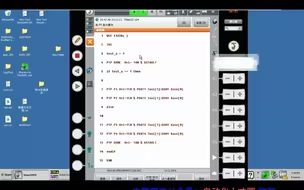
05 发那科机器人创建一个执行程序
智能焊接
21 发那科机器人轴的限值设置
72 发那科机器人用工人操作面板操作人物
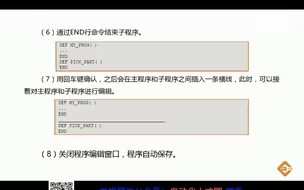
06 发那科机器人程序编辑方法
70 发那科机器人使用Target面板
12 发那科机器人码垛仿真环境设定
11 发那科机器人工件搬运仿真
42 发那科机器人在程序中新插入空行
25 发那科机器人运动指令讲解
24 发那科机器人程序内容和操作
40 发那科机器人在程序中调用子程序
63 发那科机器人操作面板设置为中文界面
45 发那科机器人在程序中重新编码编号
第13讲 KUKA机器人询问或if分支
01 发那科机器人公司及产品介绍
工程师示教复合机器人抓取点位
11_1KUKA机器人局部子程序和全局子程序的使用
04-6KUKA机器人机器人的手动运行-1
相机与机器人socket通讯程序现场调试讲解