V
主页
京东 11.11 红包
01 发那科机器人公司及产品介绍
发布人
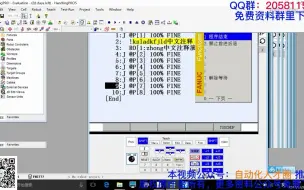
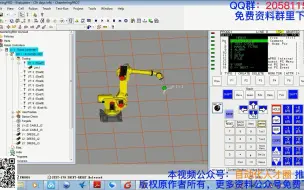
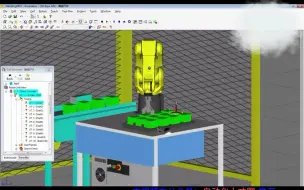
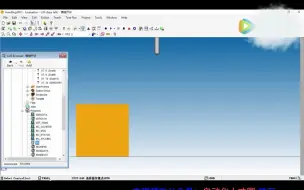
FANUC发那科工业机器人基础教程
打开封面
下载高清视频
观看高清视频
视频下载器
32 发那科机器人位置寄存器的使用
31 发那科机器人寄存器的使用
02 发那科仿真软件Roboguide的安装a
41 发那科机器人在程序中使用注释
08 发那科机器人PR寄存器讲解
62 发那科机器人与三菱q plc cclink设置
28 发那科机器人定位指令讲解
56 发那科机器人修改机器人关节运动范围
07 发那科机器人通用io的分配
64 发那科机器人输入中文注释
11 发那科机器人三点法标定工具坐标系定点的操作过程
59 发那科机器人的基本设置
06 Roboguide 和机器人手册的配合使用a
08 发那科机器人专用io分配
75 发那科机器人使用运行面板控制机器人
58 发那科机器人的系统配置
57 发那科机器人修改机器人的负重配置
25 发那科机器人运动指令讲解
第02讲 KUKA机器人变量
53 发那科机器人恢复机器人程序
05 发那科机器人创建一个搬运项目a
60 发那科机器人试运行
33 发那科机器人准备创建机器人程序
49 发那科机器人在程序中使用分支语句if-select
11 发那科机器人工件搬运仿真
74 发那科机器人用Path工具画运动曲线
21 发那科机器人轴的限值设置
52 发那科机器人备份机器人程序
14 发那科机器人工具坐标系的手动切换和自动切换
05 发那科机器人创建一个执行程序
65 发那科机器人示教器简易画面切换
50 发那科机器人在程序中使用跳转语句JMP-LBL
34 发那科机器人创建机器人程序
30 发那科机器人模拟量io的使用
13 发那科工业机器人码垛的示教
72 发那科机器人用工人操作面板操作人物
09 发那科机器人PR寄存器软件操作示范
36 发那科机器人在程序中使用io控制机器工具
KUKA机器人高级编程(下)2-2 用KRL编写运动指令C
55 发那科机器人修改机器人系统变量的数值