V
主页
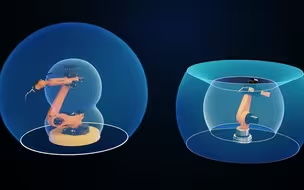
折纸结构启发的软扭转致动器|2022|SoRo【南方科技大学】
发布人
折纸结构启发的软扭转致动器(Origami-Inspired Soft Twisting Actuator) 论文:Li, Diancheng, Dongliang Fan, Renjie Zhu, Qiaozhi Lei, Yuxuan Liao, Xin Yang, Yang Pan et al. "Origami-inspired soft twisting actuator." Soft Robotics (2022). 链接:https://www.liebertpub.com/doi/10.1089/soro.2021.0185
打开封面
下载高清视频
观看高清视频
视频下载器
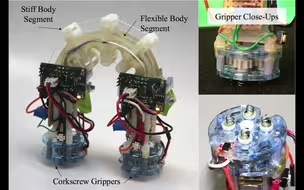
啄木鸟启发的机械手|2022【日本九州大学】
瓢虫启发的折纸机器人|2020|韩国首尔大学【Science Robotics】
单驱管道爬行软体机器人|2022 【SoRo软体机器人】
软机器人学习爬行|2022【丰田工业大学芝加哥分校】
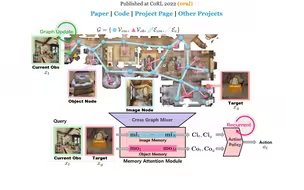
拓扑语义图存储器 |CoRL 2022【首尔国立大学】
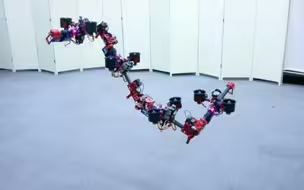
3D软体机器人蛇|2022【伍斯特理工学院】
Flippy:一种软体自主攀爬机器人|2017【哈佛大学工程与应用科学学院】
无人值守TIGER|2021【韩国现代汽车】
变形的机器龟|2022|耶鲁大学【nature】
栖息的类鸟机器人|2021|斯坦福大学【Science Robotics】
被动动态双足行走:迈向乐高大小人形机器人|2022 ICRA【卡内基·梅隆大学】
超高速小型软体电磁机器人|2022【Nature Communications】
环形软舞机器人|2022【北卡罗来纳州立大学】
开源Mobile ALOHA:学习双手移动操作|2024【斯坦福大学】
轮足机器人|2021|TIMA【乌克兰】
微小型管道机器人:实现亚厘米级管道探测|2022|清华大学【Science Robotics】
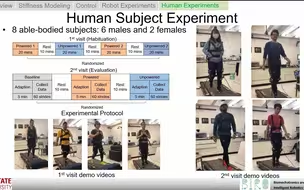
轻量膝关节外骨骼|2022【TRO】
像动物一样进化的软体机器人|2021【MIT】
开源MonoNav:通过单目深度估计和重建进行导航|2023【普林斯顿大学】
准备爬行「3D打印爬行机器人」|2016【東京大学】
Ascento Pro专业版|2021【苏黎世联邦理工学院】
轻量型机器人腿假肢-复现膝盖、脚踝和脚趾关节的生物力学|2022|犹他大学【Science Robotics】
遥操作机器人中风干预|2022|Science Robotics【MIT】
泡泡造软体机器人|2021【Nature】
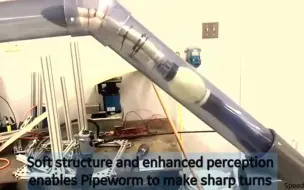
管-虫机器人“Pipe-worm” Robot|2022【通用电气】
飞行-履带混合式机器人「HUUVER」2022【欧盟】
Ballie|2020【韩国三星】
利用机器人与元宇宙“Expanding Human Reach”|2022 CES【韩国现代汽车】
ElectroVoxel:模块化自重构机器人|2022【MIT】
了解机器人的工作空间|2021【Lesics】
具有平面规律的单目视觉惯性里程计|2023【特拉华大学】
带触觉的灵巧操作|2023【哥伦比亚大学】
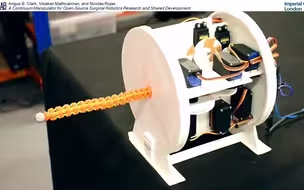
连续机械手-开源手术机器人研究|2021|帝国理工学院【T-MRB】
开源动力机器人倡议:四足机器人Solo和双足机器人Bolt|2022【纽约大学&马普所&苏黎世联邦理工】
飞龙机器人:空中机器人实现了工业阀门操作|2022【東京大学】
人类步态周期仿真|2021【Michael Whittle】
可以取回意外吞食物体的磁性粘液机器人|2022【香港中文大学】
启用虚拟移动「本田Avatar Robot」分身机器人|2021【日本本田技研工業株式会社】
学习猴子在树上荡来荡去|2022【英属哥伦比亚大学】
管道攀爬机器人:RSTAR|2022【Ben-Gurion University of the Negev】