V
主页
Towards Trustworthy Autonomy - Generalizability, Safety, Embodiment
发布人
https://www.youtube.com/watch?v=JSjWfGRGDHw
打开封面
下载高清视频
观看高清视频
视频下载器
[CoRL2023] OOD Workshop: 如何在分布之外泛化机器人
Chris Manning AI Q&A
一种结构化方法来实现机器人学习泛化
TPU V4 and Trends in Accelerator Hardware
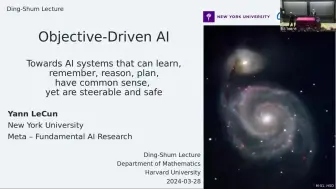
目标驱动AI: Towards AI systems that can learn, remember, reason, and plan
通过语言、逻辑和YouTube视频数据实现长期操作的可扩展机器人学习
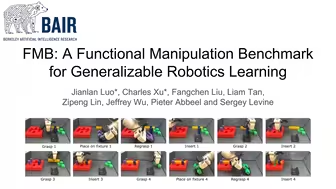
FMB:泛化机器人学习的功能性操作基准
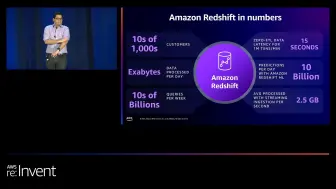
Amazon Redshift-云数仓的十年创新
字节万级GPU集群LLM训练
RISC-V Microprocessors
机器人控制的不同鲁棒性观点
AI Safety, RLHF, and Self-Supervision - Jared Kaplan | Stanford MLSys #79
Jacob Steinhardt: 超大模型对齐的挑战
从物理互动中学习结构化世界模型
[Stanford Seminar] 设计下一代自动驾驶技术栈架构
物理视角看GNN
机器人空间感知基础
Zero Bubble (Almost) Pipeline Parallelism
Real World Robotics Tutorial7:Bringing Robots to the World
GRASP on Robotics:波斯顿动力AI
机器人可达性研究
Geometric Regularizations for 3D Shape Generation
Learning Abstractions from Humans
通过第一人称视频进行机器人学习
下一代机器人感知:3D场景图,可验证算法,自监督学习
Bill Dally,Directions in Deep Learning Hardware
[OSDI2023] Sky Computing
迈向机器人多智能体系统中大规模合作学习
Machine Unlearning of Features and Labels
3DV 2024,下一代reconstruction
Stanford CS25: Robotics and Imitation Learning
基于Epigraph Form和DRL的Stabilize-Avoid最优控制算法
[Stanford MLSys] Hardware-aware Algorithms for Sequence Modeling
多机器人协作感知数据集
走向一个ML优化加速的大一统理论
自下而上的多模态学习
Berkeley EECS研讨会讨论:Future of Robotics
Real World Robotics Tutorial3:识别机器人的运动学和动力学
通过扩散策略进行机器人灵活操作
MuxServe:灵活的多路复用实现高效的多个LLM服务