V
主页
多机器人协作感知数据集
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
下一代机器人感知:3D场景图,可验证算法,自监督学习
从物理互动中学习结构化世界模型
通用机器人路径思考:scaling law、数据飞轮和具身智能
家庭通用机器人
机器人控制的不同鲁棒性观点
利用结构实现高效灵活的机器人接触操作
神经场在机器人操作中的应用
机器人学习中的收缩理论
自适应协作机器人
通过学习规划和感知进行任务和运动规划
从物理系统中学习的欧几里得神经网络E(3)NN
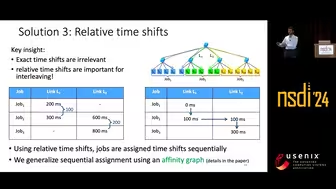
[NSDI 2024] CASSINI: ML集群中的网络感知job调度
学习野生3D动植物视觉感知
超材料类蛇直线运动机器人
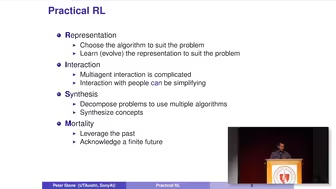
[RLC 2024] Peter Stone,实用强化学习:30 年研究的经验教训
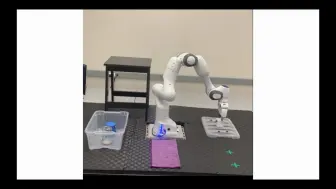
通过扩散策略进行机器人灵活操作
MIT Robotics:灵活多模态机器人工具使用
数据金字塔结构管理机器人数据
以人为中心的机器人以及学习如何实现通用性
机器人可达性研究
基于主动推理的复杂任务在线Pareto最优决策案例
亚马逊电商中的机器人
非稳态环境中的安全RL:理论与算法
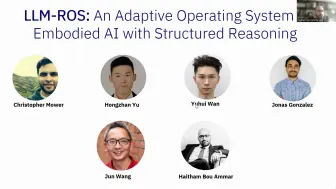
LLM与ROS(机器人操作系统)
基于事件相机的高效,数据驱动感知
Stanford CS25: Robotics and Imitation Learning
一种结构化方法来实现机器人学习泛化
新型无人机正改变游戏规则
基于优化的敏捷足式机器人控制与规划
敏捷自适应四足机器人的分层优化控制
通过第一人称视频进行机器人学习
J.P Fricker解构Blackwell GPU延迟
编译器的黄金时代
SynH2R:合成的手-物体运动以学习人机间物体传递
Berkeley EECS研讨会讨论:Future of Robotics
OmniParser:微软发布截屏解析器, 可识别任何截屏中的可交互图标,理解屏幕中各个元素的含义,从而可准确地将预期动作与屏幕上的相应区域关联操作
基于Epigraph Form和DRL的Stabilize-Avoid最优控制算法
Ameca机器人及一些讨论
SMUG Planner:一种适用于移动机器人在复杂环境中的安全多目标规划器
[CoRL2023] OOD Workshop: 如何在分布之外泛化机器人