V
主页
ABB机器人MoveJ指令介绍
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
ABB机器人MoveAbsJ指令介绍
库卡机器人轨迹逼近CONT指令介绍
ABB机器人如何创建工件坐标
ABB机器人MoveC指令介绍
库卡机器人运动指令介绍——LIN指令
库卡机器人运动指令介绍——PTP指令
库卡机器人运行方式介绍
库卡机器人逻辑指令介绍
库卡6轴机器人介绍
ABB机器人如何创建程序模块
现场ABB机器人硬件讲解介绍
KUKA机器人一键回原点
ABB机器人如何设置io信号
库卡机器人5种坐标系介绍
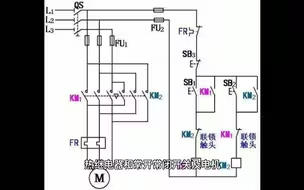
互锁电路
机器人去毛刺
机器人码垛+地轨
机器人包装
ABB机器人MoveL指令介绍
KUKA机器人车架打磨
KUKA 机器人如何创建基坐标
机器人冲压工艺——金属板材成型
KUKA机器人在地轨上移动
机器人换人
机器人视觉检测分拣操作
KUKA机器人汽车装配
ABB机器人如何设置快捷键
机器人离线编程展示
蜘蛛机器人
ABB机器人MoveAbsJ指令介绍
机器人折弯
第七章ABB机器人程序编写(一)
自锁电路
工业机器人折弯操作
KUKAC4机器人控制柜
KUKA机器人TCP工具坐标5D系统校准
各种工业机器人演示合集
并联机器人(蜘蛛手)配备视觉垃圾分拣
机器人铸造
工业机器人培训介绍