V
主页
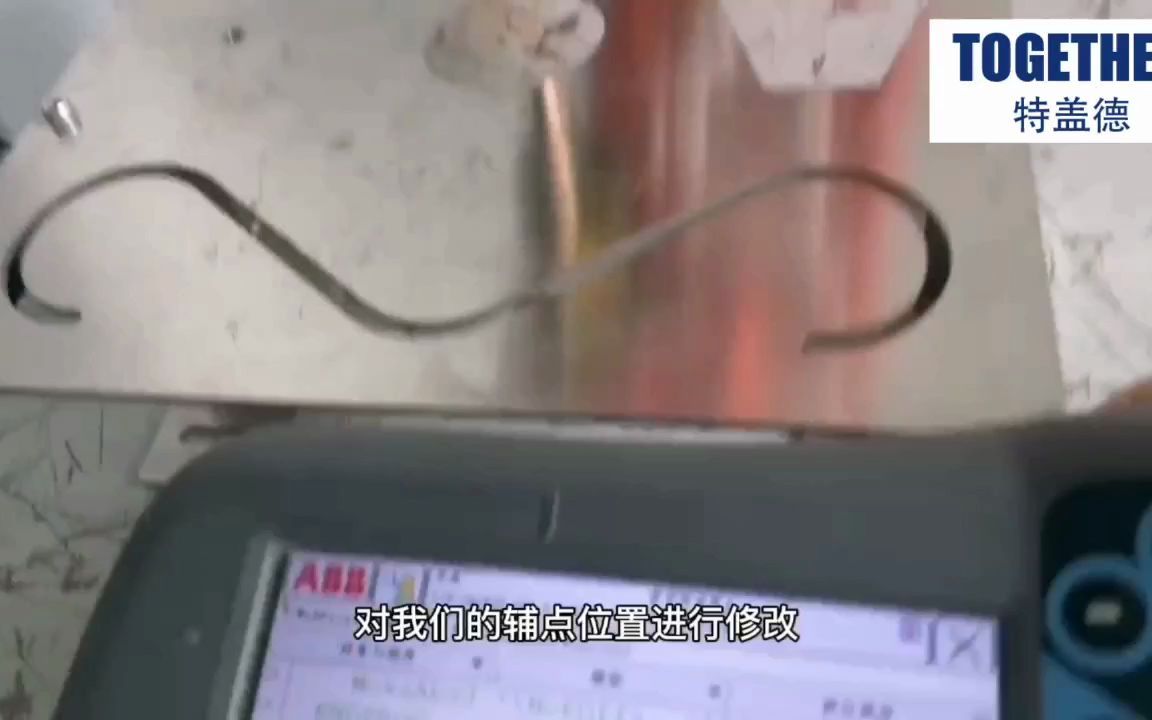
ABB机器人MoveC指令介绍
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
库卡机器人轨迹逼近CONT指令介绍
库卡机器人逻辑指令介绍
ABB机器人MoveC指令介绍
库卡机器人运动指令介绍——PTP指令
ABB机器人如何创建程序模块
ABB RobotStudio机器人码垛教程
ABB机器人6轴机器人各轴介绍
库卡机器人5种坐标系介绍
ABB机器人如何创建工件坐标
库卡机器人运行方式介绍
工业机器人如何示教点位,零基础学习工业机器人
ABB机器人MoveJ指令介绍
KUKA机器人一键回原点
认识ABB机器人示教器,手把手教你学会abb机器人示教器编程
中国人形机器人发展现状!憋住不要笑!
库卡机器人运动指令介绍——LIN指令
库卡机器人运动指令介绍——CIRC指令
ABB机器人MoveL指令介绍
ABB机器人一键回原点教程。我是余工,学习电气自动化不迷路
库卡机器人示教器按键功能介绍
ABB机器人MoveAbsJ指令介绍
ABB机器人如何设置io信号
KUKA机器人自动弧焊
ABB机器人6轴机器人各轴介绍
库卡机器人如何创建程序模块
工业机器人如何校准,零基础学习工业机器人
凸轮机械手原理动画
机器人离线编程展示
工业机器人由哪三部分组成?学abb工业机器人必看知识
RobotStudio虚拟仿真:ABB机器人基于系统信号的外部启动运行
第十六期:程序偏移
KUKA 机器人如何创建基坐标
机器人桶装液体码垛
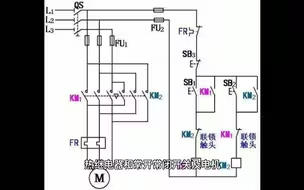
互锁电路
库卡机器人TCP校准助手
【New Start Robotics】VEX High Stakes Summer Reveal
机器人做奶茶
机器人胶粘合剂和密封剂的自动应用
机器人加油
机器人离线电脑编程设置TCP