V
主页
第四章 HarmonyOS驱动开发8.总线驱动开发及实现之SPI
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
第四章 OpenWrt开发实战 3.驱动程序的编写和编译
第四章 飞控开发高级篇 1.飞控整机代码走读、编译与烧写
第四章 OpenWrt开发实战 2.应用程序的编写和编译
第四章 蓝牙BLE通信篇1.收发实验
第三章 遥控器开发实战教程 4.SPI(OLED显示屏)
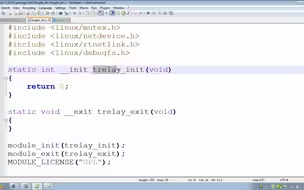
4-2 鸿蒙OS应用开发实战-驱动程序示例1-疯壳出品
第二章 飞控开发基础篇 7.SPI(气压计数据获取)
第二章 飞控开发基础篇 9.PWM(电机控制)
第一章 需求分析1.整机测试及需求分析
第一章 入门篇 8.MTK编程之新增APP
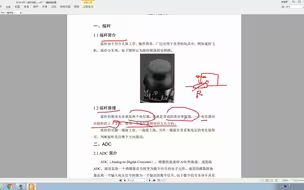
第三章 遥控器开发实战教程 3.ADC(摇杆控制)
第一章 快速上手篇 1.开发套件介绍及测试
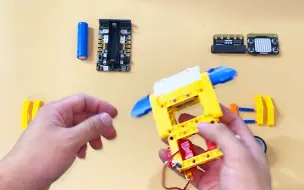
小飞车安装
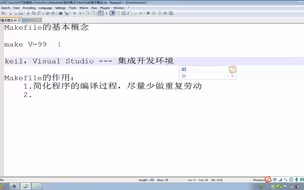
第三章 OpenWrt开发基础 8.Makefile——基本概念
第一章 快速上手篇2.CC3200_开发环境搭建
疯壳AI开源编队无人机开发实战 3-5 SPI(2.4G双机通信)
第八章 Android系统定制 2.GPS,android-HAL实现
疯壳AI开源编队无人机开发实战 2-9 PWM(电机控制)
第二章 飞控开发基础篇 10.PID基础原理
第五章 内核驱动基础篇 2.SOC资源简介及IO原理
第四章 HarmonyOS驱动开发5.总线驱动开发及实现之GPIO
第二章 硬件开发篇 1.硬件开发全程实录
第二章 飞控开发基础篇 5.串口(视觉数据获取)
【华为鸿蒙开发】学完直接入职华为 鸿蒙开发教程 零基础可学 学完直接上岗 全程干货无废话 学不会自己去反省!
第二章 寄存器基础实验7.SPI实验
第二章 HarmonyOS开发环境搭建1.Windows及Linux开发环境搭建
疯壳AI开源编队无人机开发实战 3-4 SPI(OLED)
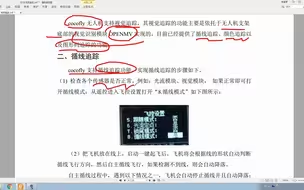
第四章 飞控开发高级篇 5.视觉追踪(巡线追踪、颜色追踪、图形码小车追踪)
第一章 入门篇 5.MTK编程之入门
第一章 快速上手篇3.CC3200_开发软件的使用
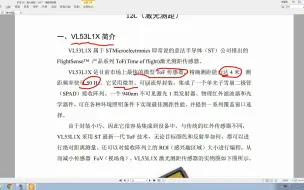
第二章 飞控开发基础篇 8.I2C(激光测距)
第八章 Android系统定制 1.Android HAL硬件抽象层简介
LED心跳扑通扑通
自动路灯
疯壳AI开源编队无人机开发实战 4-5 视觉追踪
第四章 蓝牙BLE通信篇5.中断实验
第二章 飞控开发基础篇 3.串口(基础收发)
第一章 快速上手教程 7.地面站上位机的使用与介绍
【华为鸿蒙开发教程】华为大佬耗时三个月录制的鸿蒙开发教程 整整300集 拿走不谢 小白学完第二天入职华为 你学不会 自己去反省!
第四章 飞控开发高级篇 2.遥控整机代码走读、编译与烧写