V
主页
京东 11.11 红包
疯壳AI开源编队无人机开发实战 3-5 SPI(2.4G双机通信)
发布人
该飞机综合应用了“气压定高+激光定高+光流定点”技术,可以超稳悬停;支持前后左右360度自由翻滚;支持AI语音识别控制;支持视觉追踪图码、追踪颜色、追踪形状、追踪小车等;支持寻线;支持编队飞行;支持高清图传及WIFI-APP控制(选配);支持自主巡航! 硬件原理图开放、源码开放、教学视频免费观看!
打开封面
下载高清视频
观看高清视频
视频下载器
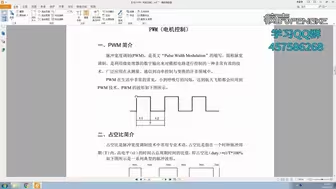
疯壳AI开源编队无人机开发实战 2-9 PWM(电机控制)
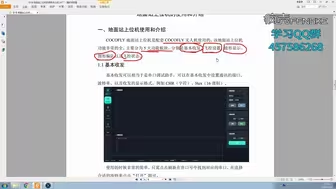
疯壳AI开源编队无人机开发实战 1-6 地面站上位机的使用和介绍
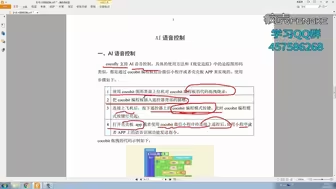
疯壳AI开源编队无人机开发实战 4-6 AI语音控制
疯壳AI开源编队无人机开发实战 2-8 I2C(激光测距)
疯壳AI开源编队无人机4-3 飞控开发高级之定高、定点、悬停
疯壳AI开源编队无人机cocofly开发实战课程 1-5 遥控器固件烧写
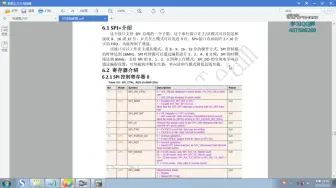
第二章 飞控开发基础篇 6.SPI(六轴传感器数据获取)
疯壳AI语音及人脸识别系统开发实战1-1系统测试
第四章 OpenWrt开发实战 3.驱动程序的编写和编译
疯壳AI开源编队无人机开发实战 2-5 串口(视觉数据获取)
疯壳AI开源编队无人机cocofly开发实战课程 1-4飞控固件烧写
第四章 OpenWrt开发实战 2.应用程序的编写和编译
疯壳AI语音及人脸识别系统开发实战3-3语音传输与解析显示
疯壳MTK之智能穿戴开发实战之入门-(5)入门
疯壳IOT无线路由器网关开发实战4.2. 应用程序的编写和编译
疯壳AI开源编队无人机3-3 遥控器开发之ADC(摇杆控制)
疯壳AI开源编队无人机cocofly开发实战课程 1-1开机测试及硬件资源介绍-2
疯壳MTK智能穿戴开发实战入门-(4)编译指令-2
第一章 入门篇 1.MTK开发之环境配置
第五章 专题实验篇3.SPI-FLASH专题实验
疯壳开源Android嵌入式Linux开发实战5 驱动程序编写
第四章 飞控开发高级篇 1.飞控整机代码走读、编译与烧写
疯壳智能手环开发实战1-9不带屏_步伐同步
疯壳MTK智能穿戴开发课程
疯壳智能硬件开发实战蓝牙手表5_SPI
疯壳智能硬件开发实战蓝牙手表0_需求分析
疯壳Android嵌入式Linux开发课程
【开源】疯壳BLE蓝牙DA14580开发板1-1整板测试
疯壳蓝牙智能手表开发课程(OLED全彩屏蓝牙手表)
第一章 需求分析1.整机测试及需求分析
第一章 快速上手篇 1.系统测试
疯壳AI语音及人脸识别系统开发实战2-1CC3200简介
疯壳MTK智能穿戴开发实战之入门-(1)环境配置
【开源】疯壳BLE蓝牙DA14580开发板2-7 SPI实验
疯壳蓝牙智能手环开发课程
疯壳AI语音及人脸识别系统开发实战2-8Wifi-Tcp网络通信
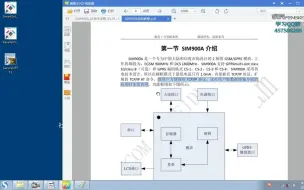
ARM双处理器手机开发板4.1 SIM900A通信实验
疯壳IOT无线路由器网关开发实战2.2. 开发环境搭建——Vbox导入一个已经安装好的vdi文件并重新设置UUID
疯壳IOT无线路由器网关开发实战4.1. 如何更换原生logo
疯壳蓝牙心率防水运动手环 1.整机测试