V
主页
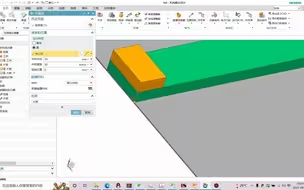
4-模型3:铰链副、滑动副
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
自动涂胶演示
1-模型1:刚体、碰撞体
2-模型1:补充
第13讲 星、三角连接的转换(1)
3-模型2:刚体、碰撞体、传送带练习
第27讲 电感的作用机理及数学模型推导
0-三轴联动运动控制算法展示
第14讲 星、三角连接的转换(2)、电压源电流源概念
24-while循环(2)
机器人压装工作站-2
29-RC电路的响应(1)
机器人压装工作站-4
10、螺旋副、力、力矩、弹簧阻尼器
第7讲 电位的概念
机器人压装工作站-3
指向函数的指针-2
机器人压装工作站-1
第2讲 电路模型、参考方向
电工学期末复习-2
20-if else
第41讲 相量图及正弦波形的画法
机器人压装工作站7-机器人路径2-3-夹具夹具控制
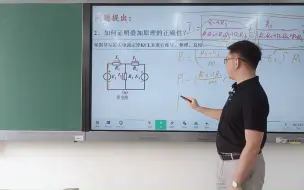
第18讲 叠加原理(2)
3-进制转换的原理
二维表格的输入输出
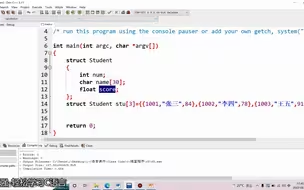
结构体数组
第8讲 电位的计算
第9讲 第一章作业讲解(1)
压装工作站8
13-交流电的相量表示.mp4
枚举
23-while循环(1)
机器人压装工作站6-机器人路径1
数组中找最大元素
第39讲 欧拉公式深入理解下的傅里叶变换
第37讲 交流电产生原理及周期性事物描述方法
9.力矩控制-弹簧阻尼器
8.力控制-2
第4讲 电源的开路、短路、有载工作
操作寄存器点亮LED-置1、置0、移位公式