V
主页
京东 11.11 红包
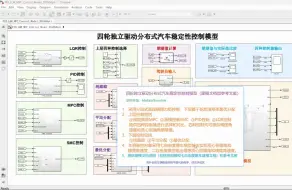
分布式驱动电动汽车复合制动分层控制
发布人
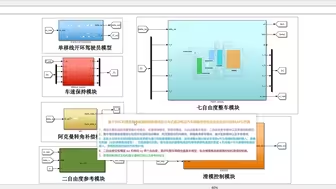
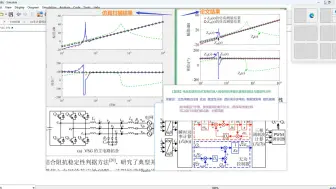
分布式驱动电动汽车复合制动分层控制 1、包括七自由度整车模型、魔术轮胎模型、电机模型、电池模型 2、目的:前、后轮均能进行再生制动的复合制动系统,应使实际制动力分配曲线接近I 曲线,并且通过合理调整液压制动力与回馈制动力的分配关系,在保证制动稳定性的同时,实现能量回收的最大化 3、实现方式:①首先进行汽车前、后轮间制动力分配。为了保证制动稳定性,要使得前、后轮制动力尽可能的符合 I 曲线;②其次是在第一步的基础上进行电、液制动力分配。为了保证 能量回收率,应当使电机制动占尽可能多的份额 注:制动力上层控制器保证前、后轮滑移率相同,从而最大程度上保证车辆的制动稳定性,即不会出现前轮或后轮提前抱死的制动失稳工况 4、下层控制思路:下层复合制动制动力分配控制策略负责电机制动转矩与液压制动转矩的再分配,控制目标为制动能量回收最大 5、上层控制思路:顶层控制策略以制动稳定性为控制目标,分为常规制动制动力分配控制和防抱死制动力分配控制。①常规制动工况下的顶层控制策略,合理分配前、后轮的制动转矩,使得制动过程中前、后轮的滑移率保持相同;②防抱死制动工况下,为达到最佳的制动效果,需要将前、后轮的滑移率相同且控制在路面峰值附着系数附近,目标是使得车辆获得最佳的制动效能 6、控制总结:底层控制策略以制动能量回馈最大为控制目标,对经过顶层控制策略后分配的前、后轮制动转矩进行第二次分配,也就是将制动转矩分配为电机制动和液压制动两个部分,目标是使制动能量回馈最大 7、附带参考文献
打开封面
下载高清视频
观看高清视频
视频下载器
分层控制四轮独立驱动分布式汽车稳定性控制模型含MPC和SMC以及最优分配控制(建模文档和参考文献)
分布式驱动汽车稳定性控制分层式直接横摆力矩控制
储能电池充放电控制
基于SMC和横摆角速度跟随的轮毂电机分布式驱动电动汽车操稳性控制主动前轮转向控制(AFS)仿真
分布式锁的代码咱看不懂
自研企业级项目2024年从0到1自研企业级分布式RPC框架
分布式任务调度
【复现】光伏并网逆变器接入弱电网的序阻抗建模扫频法与稳定性分析
【评论区自行下载】硬件工程师必备电子元件基础知识(电容、电阻、电感、蜂鸣器、扬声器和磁珠等)
【网盘自取】锁相环理论知识分享
车辆动力学模型公式书-前轮转向二自由度模型解读
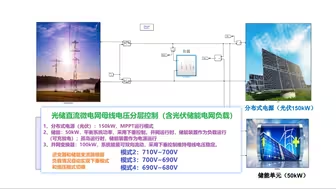
光储直流微电网下垂控制母线电压分层控制(含光伏储能电网负载)
隐式mpc+自适应mpc+时变mpc,线性时变模型预测控制Simulink仿真
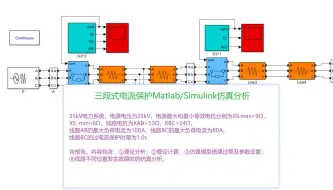
电流三段式保护继电保护课程设计Matlab/Simulink
【网盘自取1】永磁同步电机控制入门到进阶—速成!!!
Simulink和m代码_实现粒子群算法对PID 控制参数优化自动调节自整定
MPC-VSG模型预测控制和虚拟同步机控制并网逆变器
【网盘自取】平面变压器资料
【复现】电压型虚拟同步发电机接入弱电网的序阻抗建模扫频法与稳定性分析
基于DSP28335光伏并网逆变器源代码原理图PCB方案
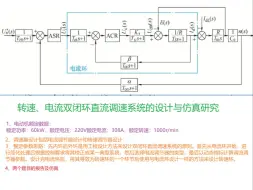
转速、电流双闭环直流调速系统的设计与仿真研究
一周刷完Java分布式面试100题(Redis+dubbo+zookeeper+MQ)这绝对是Java程序员秋招短期面试突击天花板!
MFPC+ADRC,自抗扰控制+无模型预测电流控制永磁同步电机仿真
基于VSG控制(虚拟同步发电机控制)的模块化多电平变流器MMC
基于反步法or滑膜控制orPID控制的四旋翼无人机轨迹跟踪模型
六自由度机械臂正运动学和逆运动学理论分析及程序
千万级Golang IM分布式微服务项目
双向储能逆变方案代码及PCB原理图48V-2000W
【IT老齐640】京东快递交易日均千万订单的存储架构设计
1446-小马哥Java 分布式架构 - 通用模式 第二期 2023年
2小时讲透Redis核心底层数据结构原理与应用场景,这应该是redis面试天花板教程!
一节课讲透分布式session一致性问题
2024-03-09 架构设计有什么常见的难点
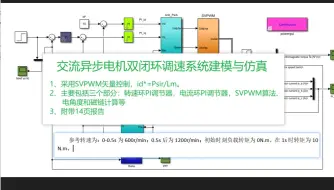
三相交流异步电机双闭环调速系统建模与仿真(参考文献加报告)
基于Simulink的粒子群(PSO)优化的模糊PID控制仿真程序(包括模糊PID和传统PID对比)
直流微网光伏储能系统SOC均衡(基础和改进SOC均衡策略对比)含变下垂系数控制和模型预测
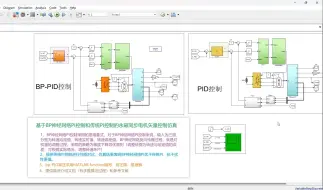
基于BP神经网络PI控制和传统PI控制的永磁同步电机矢量控制仿真
半桥LLC参数计算设计书(Mathcad)(含变压器开关管等器件选型)
基于非线性干扰观测器的机械臂自适应反演滑模控制
基于DSP28069的30kw三相PFC充电桩T型三相维也纳原理图及代码(锁相环采用先进正负序分离含中点平衡控制PWM控制)