V
主页
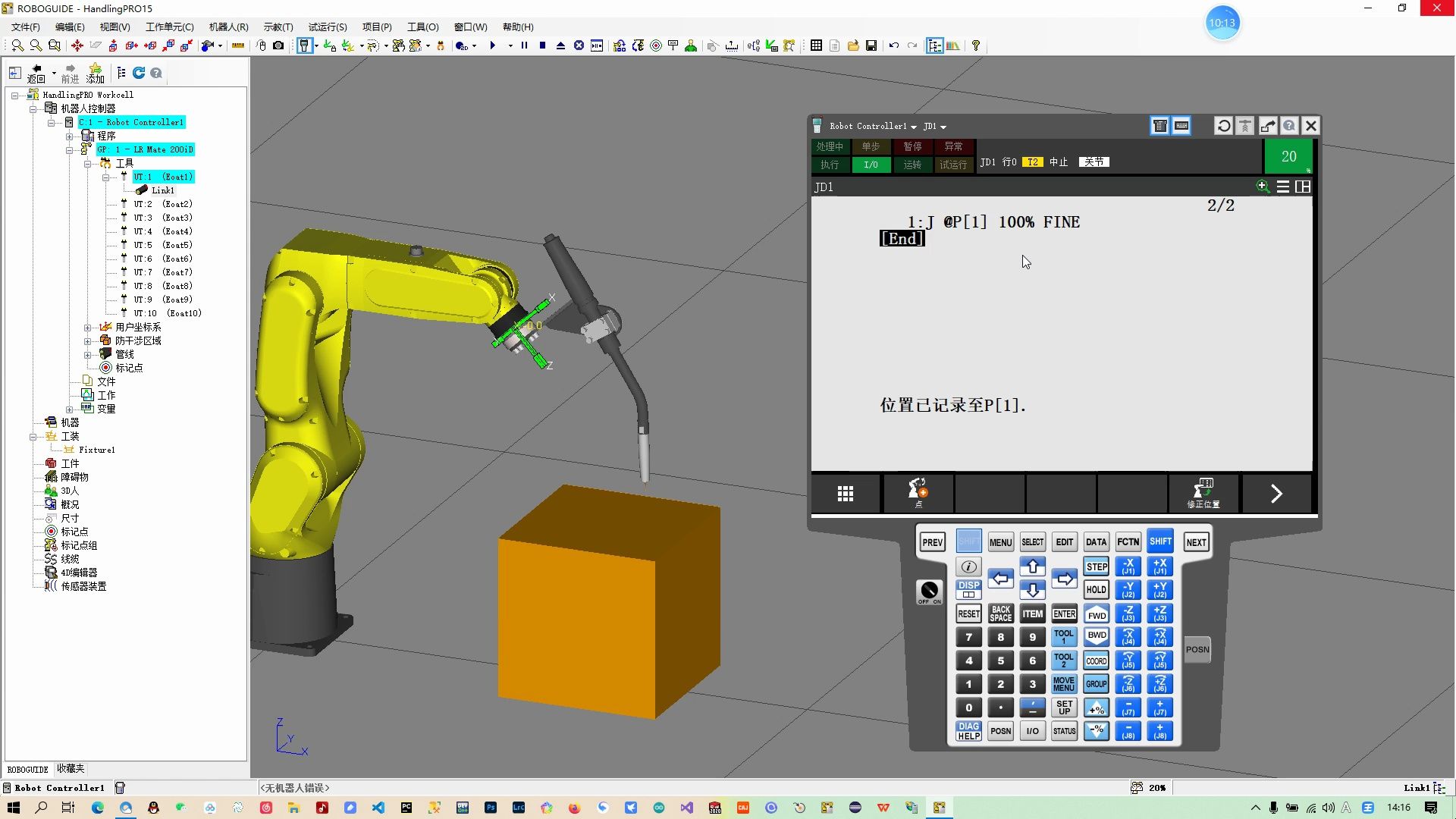
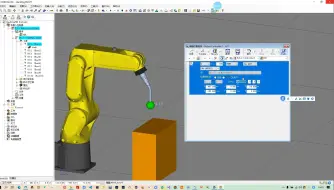
26.发那科机器人简单的示教编程【与ABB的异同】
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
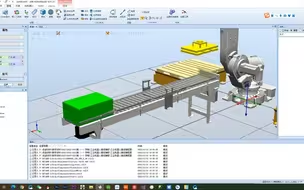
输送链搬运码垛1
27.发那科机器人坐标系的创建
1.0IO信号的定义和基本示教编程
23.生成安装包
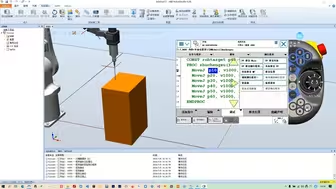
3.简单的示教编程
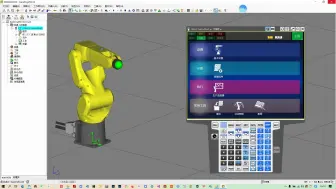
28.发那科机器人仿真环境下快速开发程序
第十四期:示教点的区别
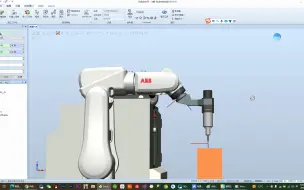
25.RoboGuide系统创建和基本操作
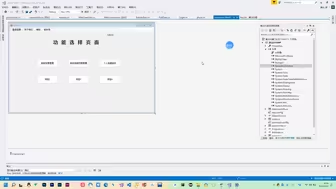
1.UI界面设计
30.火花塞搬运二【用For循环和偏移指令】
带导轨的机器人(模块化编程)2
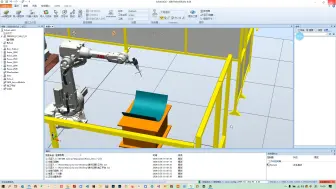
带导轨的机器人(轨迹编程)1
工业机器人系统集成组态1
14.IO配置和信号的使用
4.设计班级信息管理程序界面
13激光切割完整的(二班专用)
7.注册页面功能的实现(多个combox控件的使用)
简单的示教编程1
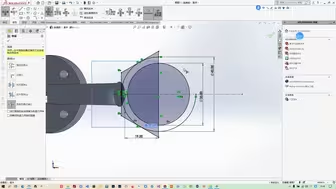
5.连接座(二)
气缸绘制第三部分正确的
SQL数据库的创建和链接
24.用户注销和修改功能的完善
9.底座的绘制2
带导轨的机器人andSmart组件初识
16.边缘提取
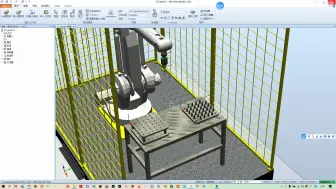
19.搬运平台的搭建和工具的创建
1.手指的绘制
5.使用反馈节点做闪烁指示灯
14综合调试1
1.手动操纵
KUKA机器人学习合集
21.连接MySQL数据库实现登录、注册、密码修改和个人信息修改等功能【选看】
5轨迹编程(版本2)
震惊 机器人可能有了想法 现在的机器人到底发展到什么程度了,中国的机器人行业怎么样,
VEX-IQ机器人 滑膛炮细节,阻拦索是不是很帅~
15.smart组件1
1.影调的应用
23.工作站逻辑【二班专用】
9.注册页面的实现【避免重复信息的录入】
视觉检测软件简介1.0