V
主页
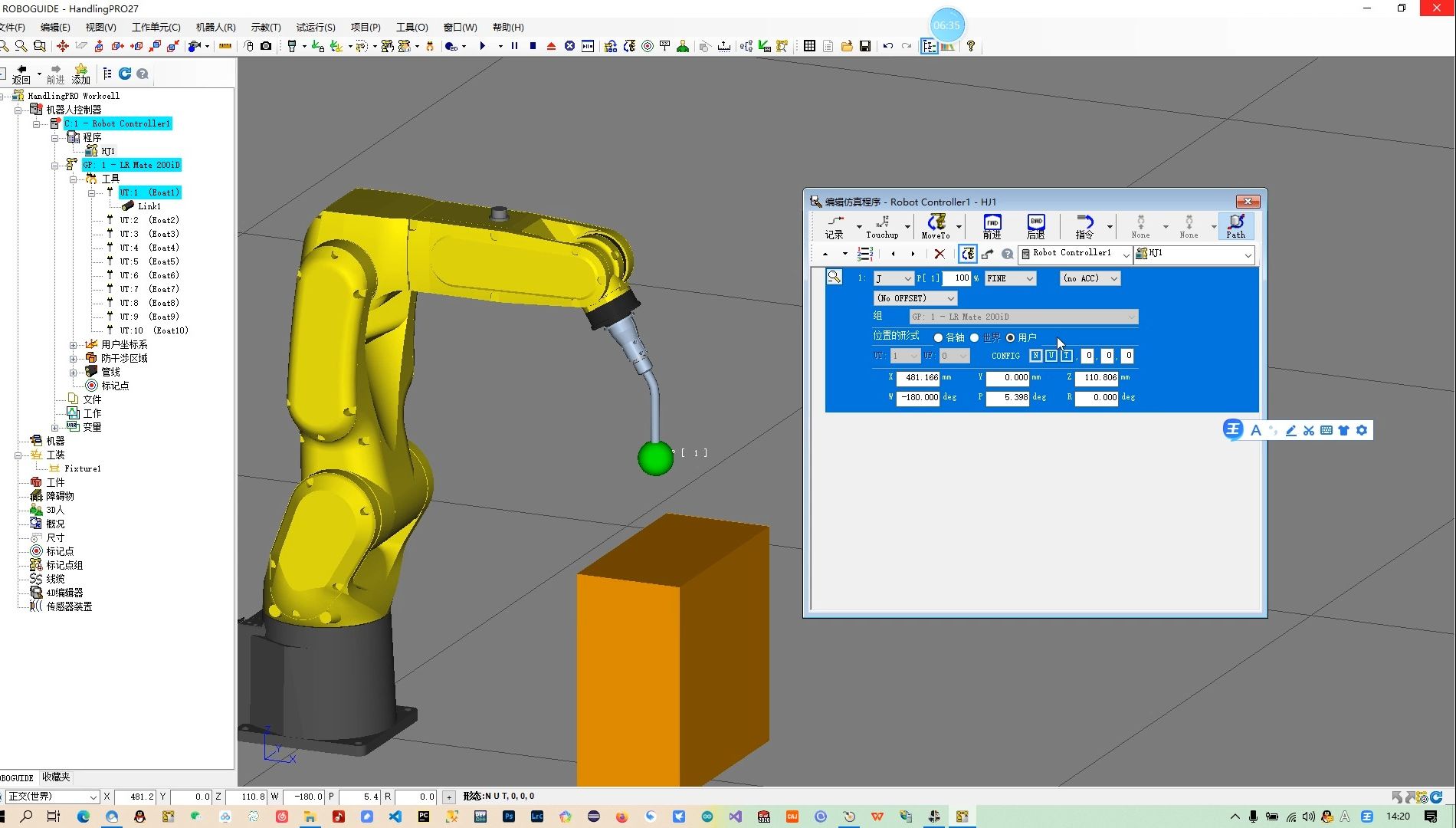
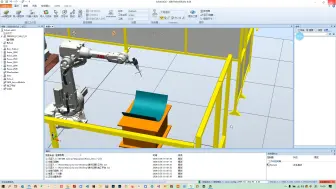
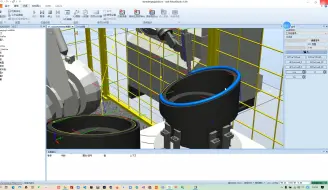
28.发那科机器人仿真环境下快速开发程序
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
27.发那科机器人坐标系的创建
26.发那科机器人简单的示教编程【与ABB的异同】
第十八期:工具偏移
带导轨的机器人(模块化编程)2
1.工业机器人系统集成组态
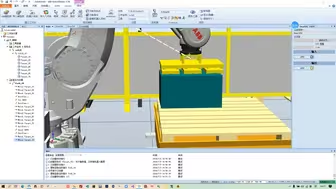
输送链搬运码垛1
第二十期:回机器人本体原点
7.注册页面功能的实现(多个combox控件的使用)
中断程序的使用
9.完善修改密码功能
13激光切割完整的(二班专用)
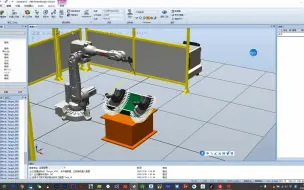
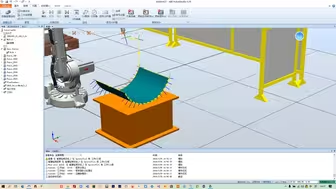
2.带护栏的机器人系统及手动操作
7.完善注册和登录功能【SQLserve数据库的基本操作】
简单的搬运任务
24.用户注销和修改功能的完善
北京机器人展迷惑事件之二
33.汽车灯罩涂胶3【中断程序应用】
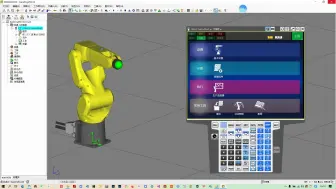
25.RoboGuide系统创建和基本操作
第十七期:码垛,拆垛
1.2激光切割离线编程
18.个人信息更改(一)
21.输送链功能的实现
17.用户密码的修改
13.window身份验证连接SQLserves数据库
30.火花塞搬运二【用For循环和偏移指令】
2.注册页面的实现mp4
34.汽车灯罩涂胶4【实现涂胶工艺控制】
12.防碰撞设定以及目标点的偏移
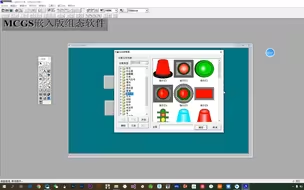
MCGS触摸屏与plc通讯连接
38.搬运码垛【带BUG的】
工件坐标系的创建
11.活塞运动仿真
22.注册功能的实现
FANUC(发那科)机器人实用小技巧,示教器的开关控制(UOP)专用外部信号启用和禁用
22.工作站逻辑
8.注册页面的实现(listview控件的使用和逻辑)
C#中的OpencvSharp配置
7.运动指令的学习(二)
29.火花塞任务(一)
19.搬运平台的搭建和工具的创建