V
主页
京东 11.11 红包
十分钟到底能不能讲明白ROS到底能做啥
发布人
十分钟到底能不能讲明白ROS到底能做啥 十分钟讲解和十分钟操作混合版。
打开封面
下载高清视频
观看高清视频
视频下载器
Autoware和ROS2课程讲座3 ROS2工具
ROS机器人虚拟仿真挑战赛rviz和gazebo
机器人操作系统云端实践平台设计与使用-实验楼ROS-
如何安装和更新机器人操作系统(ROS-Windows)
【开源教程】ROS+PX4开源机械臂控制(下)
【开源教程】ROS无人船避障代码讲解
【开源无人机】ROS无人机编队代码讲解
使用 Autoware ROS 2 CycloneDDS 实现高速自动驾驶
Autoware和ROS2课程讲座2 ROS2基础
ROS控制 | 第一轮控制功能包讲解
7.2无人机PID参数调试
【开源无人船】从零组装一艘测绘无人船
ESP32和ESP8266项目汇总2021
ROS自平衡机器人仿真(机器人操作系统+现代控制理论融合案例)
ROS-Industrial开源项目10年混剪
Autoware和ROS2课程讲座1 开发环境
蓝桥ROS云课一键配置f1tenth和PID绕圈(竞赛更新版)
ROS机器人虚拟仿真挑战赛本地电脑环境配置记录
如何在蓝桥云课ROS中搭建Arduino开发环境
ROS和ROS2借助智能大模型的学习和研究方法
SLAM 仿真测试录屏 配置环境 Gazebo Harmonic ROS Jazzy
ROS远程唤醒有难度?完全不存在的!
【开源无人机】无人机各飞行模式讲解
在webots中使用spot或spotmini说明
五类机器人学或ROS教学中最常见的错误
ROS机器人虚拟仿真挑战赛本地电脑环境配置个人问题汇总
【开源无人船】ArduPilot飞控连接MAVROS
如何高效率在蓝桥云课ROS中搭建Arduino开发环境
如何删除机器人操作系统(ROS-Windows)
蓝桥ROS密钥更新和使用catkin build
ROS2和Gazebo9中mobot速度发布和坐标订阅
学长说:有佬的帮助就是不一样!!!
无人驾驶CAN通信快速入门:部署、测试,全过程精细讲解(主讲录制人:严正清;技术小组:小组:陈云、贾岚博、刘志强、张连会)
ROS2_Arduino_ESP32
通宵做复制粘贴,2个月到手58960!收藏好这18个网站,你也可以做到!!
ROS 2和Gazebo 9中mobot多机器人图书馆环境仿真案例
【软路由折腾系列】第十一期:RouterOS利用Docker容器安装MosDNS实现DNS分流 |MOSDNS|DNS分流|DNS防泄漏|Container容器
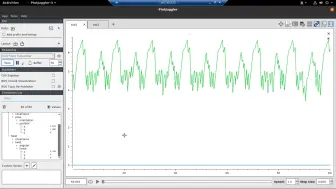
ROS机器人虚拟仿真挑战赛快速跑圈“示波器”
【开源无人机】室内款低成本无人机M0-F250介绍及代码讲解
ROS机器人虚拟仿真挑战赛时间98秒总分65分