V
主页
京东 11.11 红包
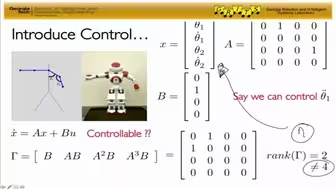
ROS机器人虚拟仿真挑战赛本地电脑环境配置个人问题汇总
发布人
当在ROS(Robot Operating System)环境中遇到“无法加载控制器”的错误时,这通常意味着ROS无法找到所指定的控制器类型。这类报错现象在ROS开发中比较常见,通常与控制器包未安装、环境变量设置不正确、依赖问题、配置错误或版本不兼容等因素有关。 下面,我们将这类报错现象作为一个通用知识点进行详细讲解: 报错现象分析 报错信息通常类似于: 复制代码 Could not load controller 'controller_name' because controller type 'package_name/ControllerType' does not exist. 这表示ROS无法识别名为controller_name的控制器,因为它所依赖的控制器类型package_name/ControllerType不存在。 通用解决步骤 检查控制器包是否安装: 确保你已经安装了提供所需控制器类型的ROS包。你可以使用apt工具来安装这些包,例如: bash 复制代码 sudo apt install ros-<distro>-<package_name> 将<distro>替换为你的ROS发行版名称(如noetic),<package_name>替换为提供控制器类型的包名(如effort-controllers)。 检查环境变量: ROS依赖环境变量来找到包和它们的资源。确保你的ROS_PACKAGE_PATH环境变量包含了你所有ROS包的路径。你可以通过以下命令来查看: bash 复制代码 echo $ROS_PACKAGE_PATH 如果没有正确设置,你可能需要source你的ROS工作空间的devel/setup.bash文件,或者确保你的工作空间被添加到了ROS_PACKAGE_PATH中。 检查依赖关系: 有时,安装一个ROS包需要先安装它的依赖包。使用apt时,通常会自动解决依赖关系,但如果出现问题,可以尝试使用apt-get -f install来修复未满足的依赖。 检查配置文件: 确保你的控制器配置文件(如YAML文件)中的控制器类型名称正确无误,并且与你安装的ROS包中的控制器类型相匹配。 重新编译工作空间: 如果你在一个ROS工作空间中进行了更改(例如添加了新的包或修改了配置文件),确保你重新编译了整个工作空间。这可以通过在你的工作空间根目录下运行catkin_make或catkin build来完成。 检查ROS版本兼容性: 确保你安装的ROS包与你的ROS发行版兼容。不同的ROS发行版可能支持不同的包版本。 查看ROS日志: 如果以上步骤都无法解决问题,查看ROS的日志输出可能会提供更多线索。你可以使用roslaunch或rosrun命令的--screen选项来在终端中显示更详细的输出。 注意事项 在安装ROS包时,请确保你使用的是与你的ROS发行版相对应的命令和包名。 当你更改了环境变量或安装了新的ROS包后,可能需要重新打开终端窗口或source相应的设置文件来使更改生效。 如果你在使用自定义的控制器或包,确保它们已经被正确编译和安装。 总结 这类报错现象通常与ROS包的安装、环境配置和控制器类型配置有关。通过检查这些方面,并按照上述步骤进行排查和修复,你应该能够解决大多数与“无法加载控制器”相关的报错问题。在ROS开发中,保持对环境和配置的敏感性,以及仔细阅读和理解报错信息,是解决问题的关键。
打开封面
下载高清视频
观看高清视频
视频下载器
ROS机器人虚拟仿真挑战赛rviz和gazebo
ROS机器人虚拟仿真挑战赛时间98秒总分65分
ROS机器人虚拟仿真挑战赛本地电脑环境配置测试
ROS机器人虚拟仿真挑战赛rviz跟随base_link视角
Autoware和ROS2课程讲座1 开发环境
ROS机器人虚拟仿真挑战赛本地电脑环境配置记录
ROS 2和Gazebo 9中mobot多机器人图书馆环境仿真案例
ROS自平衡机器人仿真(机器人操作系统+现代控制理论融合案例)
ROS机器人虚拟仿真挑战赛快速跑圈“示波器”
扫地机器人仿真(机器人工程毕业设计)学习资料
蓝桥ROS云课一键配置f1tenth和PID绕圈(竞赛更新版)
SLAM 仿真测试录屏 配置环境 Gazebo Harmonic ROS Jazzy
ROS和ROS2借助智能大模型的学习和研究方法
五类机器人学或ROS教学中最常见的错误
人工智能应用于机器人是所有新行业物联网趋势
如何安装和更新机器人操作系统(ROS-Windows)
EMO桌面宠物机器人开箱试玩
十分钟到底能不能讲明白ROS到底能做啥
ROS2和Gazebo9中mobot室内环境仿真测试
如何高效率在蓝桥云课ROS中搭建Arduino开发环境
Emo机器人最新演示与Cozmo和Vector机器人对比
2021智慧型农业机器人汇总
如何在蓝桥云课ROS中搭建Arduino开发环境
使用 Autoware ROS 2 CycloneDDS 实现高速自动驾驶
ROS-Industrial开源项目10年混剪
服务型移动机器人如何实现室内路径全覆盖清扫给你一个清爽干净的家(调试完整版记录)
RoboSim赛季 探月筑梦比赛规则
移动机器人控制系列讲座GIT (4)
移动机器人控制系列讲座GIT (7)
Scout微小型智能家用机器人开箱试玩
【python环境安装】超详细的Anaconda(python)下载、安装、环境配置及pycharm配置使用教程,适合完全零基础学习!!
【2024版】超详细的Anaconda下载安装、环境配置及pycharm配置使用教程,Python编辑环境安装,适合完全零基础学习!!
ROS2和Gazebo9中mobot跑道环境仿真测试
家用教育娱乐机器人
蓝桥ROS-差速巡线机器人设计-良好(80+)的报告-复现
Autoware和ROS2课程讲座2 ROS2基础
为什么讲机器人编程代码等知识点细节内容的时间在持续压缩
机器人操作系统云端实践平台设计与使用-实验楼ROS-
ROS2机器人应用简明教程01文档
ROS2机器人操作系统简介2021英文字幕版本