V
主页
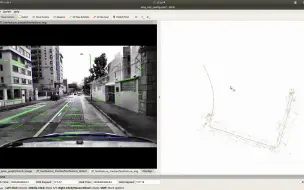
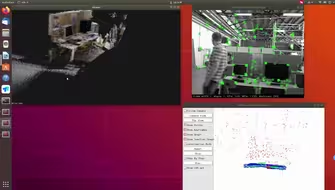
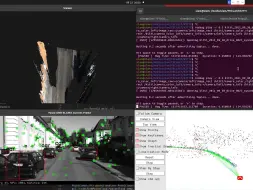
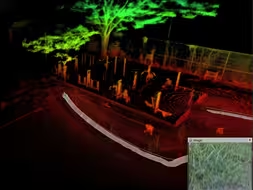
ORB-SLAM3 融合点线特征的稠密建图
发布人
ORB_SLAM3 融合点线特征的稠密建图 代码分享群: 835390885
打开封面
下载高清视频
观看高清视频
视频下载器
Yolov8+ORBSLAM3点线融合+动态物体剔除
基于 ORBSLAM3的室内重建
ORBSLAM3 稠密建图
vins-mono+yolo 点线融合
ORBSLAM3_nerf 单目稠密建图
ORBSLAM3纯视觉建图和导航
ORBSLAM2分割地面点云后的栅格和八叉树建图效果
orbslam3 稠密建图转栅格和八叉树
orbslam3 双目IMU稠密建图
orbslam3_yolo
激光相机三维重建
基于 orbslam3 的双目稠密建图
orbslam3稠密建图 yolo删除动态物体
fatlivo 激光相机融合建图
vins运行香港城市数据集 点线特征融合
Gaussian Splatting三维重建之沈阳理工大学图书馆
ORBSLAM3定位建图+导航+物体识别
ORBSLAM3 Nerf
ORBSLAM3 重定位效果
orbslam3纯视觉自主建图 RRT
LIOSAM
orbslam3 双目稠密建图_yolov5
雷达相机融合测距
orbslam2 稠密转栅格地图
双目稠密建图
orbslam3 yolov8-seg分割方法剔除动态点
Fastlio2使用ouster 64线雷达建图
远超所有SOTA!ETH最新4DGF结合3DGS和NeRF速度还能加速200倍!
orbslam3双目稠密_yolo
CVPR24 最佳学生论文:实现3DGS新突破,任意尺度无锯齿渲染!三名华人学者参与!
ORBSLAM3 稠密建图
如何使用全景相机去做gaussian splatting 教程1(vismap 篇)
VINS-mono点线融合
orbslam2稠密建图运行数据集
rgbd-slam-v2
orbslam2建图导航
【XTDrone】无人机 ORBSLAM3 双目IMU模式 gazebo仿真
地面重建测试 | DLIO+UFOMap
华科大最新PointDreamer3D纹理重建,清晰如真
基于二维码的建图定位